
27/06/2024
Door Ad Spijkers
Onderzoekers aan de TU Eindhoven hebben een zachte 'robothand' ontwikkeld waarmee toekomstige chirurgische robots ontworpen zouden kunnen worden.
In toekomstige ziekenhuizen worden zachte robots misschien gebruikt als chirurgische robots. Maar eerst moeten onderzoekers uitzoeken hoe ze vervormbare robots precies kunnen besturen en laten bewegen. Bovendien bevatten veel van de huidige zachte robots metalen, waardoor hun functioneren in waterrijke omgevingen - zoals het menselijk lichaam - nogal beperkt is.
Onderzoekers aan de TU Eindhoven hebben een zachte robothand of -grijper van grafeen en vloeibare kristallen ontworpen. Beide zijn organische materialen. Dat biedt mogelijkheden om in de toekomst een zachte robot veilig te gebruiken bij operaties.
Zachte hand
Gewoonlijk worden robots gemaakt van metalen, die stijf en hard zijn. Maar in bepaalde toepassingen beperkt juist dat de prestaties. Bij zachte robotica is het doel om robots te maken van materialen die in bepaalde situaties kunnen vervormen en zich dan gedragen als de meer traditionele harde robots. Ontwerpers moeten dus nadenken over verschillende soorten materialen waarmee deze kunnen worden gemaakt. Vloeistoffen, gels en elastische materialen zijn gemakkelijk vervormbaar.
Zachte robots kunnen een grote impact in de chirurgie. Voor een chirurg kunnen veel operaties complex en delicaat zijn en specifieke handigheid vereisen. Soms is dat niet mogelijk en nemen ze hun toevlucht tot robots. Maar stijve robots kunnen sommige gebieden ook niet gemakkelijk bereiken. Daar kunnen zachte robots het verschil maken. Het doel van de Eindhovense onderzoekers is om letterlijk een potentiële helpende hand te bieden voor bijvoorbeeld het vastklemmen en hechten van apparaten die gebruikte worden tijdens operaties.
Nieuwe materialen
Voor hun onderzoek kozen de wetenschappers er voor om een ander soort vervormbaar materiaal - vloeibare kristallen - samen met grafeen te gebruiken om een zacht grijpapparaat of 'hand' te maken met vier bestuurbare en vervormbare 'vingers'.
Een vloeibaar kristal gedraagt zich als een vloeistof of een vaste stof, afhankelijk van hoe het wordt geëxciteerd of verstoord. Als het vloeit, gedraagt het zich als een vloeistof. Maar in speciale situaties kunnen de moleculen in de vloeistof zichzelf rangschikken om een regelmatig patroon of regelmatige structuur te creëren, zoals een kristal dat je onder een krachtige microscoop zou zien in een vast materiaal. Deze eigenschap van vloeibare kristalmaterialen maakt ze geschikt voor het maken van zachte robots.
Werking
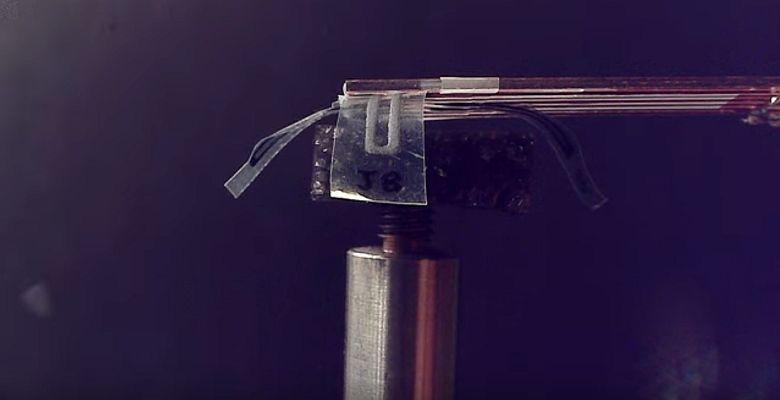
Met de geselecteerde materialen gingen de onderzoekers aan de slag om een actuator te ontwerpen en te maken. Ze ontwierpen een grijperapparaat met vier 'vingers' die worden aangestuurd met actuatoren uit vloeibare kristalnetwerken die vervormen. Dit gebeurt dankzij het effect van warmte van op grafeen gebaseerde verwarmingselementen of sporen in de vingers van de grijper of 'hand'.
Wanneer elektrische stroom door de zwarte grafeenbanen loopt, worden de banen warm. Dit verandert de moleculaire structuur van de vingers van vloeibaar kristal en sommige moleculen gaan van geordend naar ongeordend. Dit leidt tot buiging van de vingers. Zodra de elektrische stroom wordt uitgeschakeld, gaat de warmte verloren en keert de grijper terug naar zijn oorspronkelijke staat.
Een van de grootste uitdagingen voor de onderzoekers had te maken met de grafeen verwarmingselementen. De onderzoekers moesten er voor zorgen dat ze de juiste temperatuur bereikten om de vloeibare kristallaag te veranderen. Dat moet gebeuren met een veilige elektrische spanning. Aanvankelijk bereikten de grafeenelementen niet de juiste temperaturen bij veilige spanningen of ze zouden oververhit raken en het apparaat verbranden.
De onderzoekers ontwierpen uiteindelijk een actuator die zonder problemen werkt bij elektrische spanningen van minder dan 15 V. Hiermee kunnen de grijpers kleine voorwerpen met een massa tussen 70 mg en 100 mg optillen. Dit lijk niet veel, maar in medische toepassingen zoals chirurgie kan dit nuttig zijn voor de exacte en minuscule beweging van kleine gereedschappen, implantaten of biologisch weefsel.
Geprinte robot
Voor de toekomst hebben de onderzoekers interessante plannen. Ze willen een volledig geprinte robot maken door een vloeibare kristallaag te 3D-printen. Voor de huidige grijper hebben ze de laag gemaakt door materialen in een mal te gieten. Andere onderzoekers hebben laten zien dat vloeibare kristallen geprint kunnen worden. Voor deze grijper hebben is de grafeenlaag geprint, dus een volledig geprinte hand behoort tot de mogelijkheden.
Foto: screendump video TU Eindhoven