
28/06/2022
Door Ad Spijkers
Net als mensen kunnen robots niet door muren heen kijken. Soms hebben ze een beetje hulp nodig om te komen waar ze heen moeten. Computerwetenschappers van Rice University in Houston (Texas) hebben een methode ontwikkeld waarmee mensen robots kunnen helpen hun omgeving te 'zien' en taken uit te voeren.
De strategie genaamd Bayesian Learning in the dark – kortweg BLIND – is een nieuwe oplossing voor het al lang bestaande probleem van bewegingsplanning voor robots die werken in omgevingen waar niet alles altijd duidelijk zichtbaar is.
Algoritme
Het algoritme houdt een mens op de hoogte om de robotperceptie te verbeteren en, belangrijker nog, de uitvoering van onveilige bewegingen te voorkomen, aldus de onderzoekers. Om dit te doen, combineerden ze Bayesiaanse inverse versterkingsleer (waardoor een systeem leert van voortdurend bijgewerkte informatie en ervaring) met gevestigde bewegingsplanningstechnieken om robots te helpen met hoge vrijheidsgraden, dat wil zeggen: veel bewegende delen.
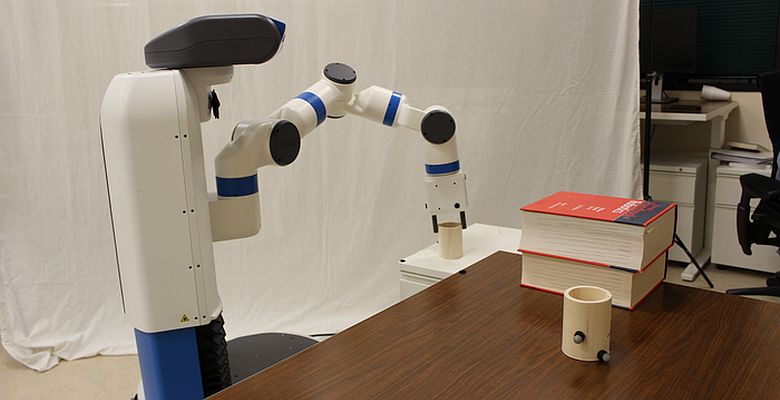
Om BLIND te testen, stuurde het Rice-lab een Fetch robot, een scharnierende arm met zeven gewrichten, om een kleine cilinder van een tafel te pakken en naar een andere te verplaatsen. Daarbij moest de robot wel voorbij een barrière zien te komen. Maar als een robot meer gewrichten heeft, zijn de instructies ingewikkeld. Een mens regisseert doorgaans goed op eenvoudige commando's. Maar een robotprogrammeurs moet specifiek zijn over de beweging van elk gewricht op elk punt in zijn traject, vooral wanneer obstakels het 'zicht' van de machine op zijn doellocatie belemmeren.
Tussenpersoon
In plaats van vooraf een traject te programmeren, voegt BLIND een menselijk tussenproces in om de gechoreografeerde opties – of beste gissingen – die door het algoritme van de robot worden voorgesteld, te verfijnen. Met BLIND kunnen programmeurs informatie in het hoofd van de mens op te nemen en in de gegeven ruimte met een hoge mate van vrijheid banen te berekenen.
De ontwikkelaars gebruiken een specifieke manier van feedback die kritiek wordt genoemd. In feite is het een binaire vorm van terugkoppelng waarbij de mens labels krijgt op stukken van het traject. Deze labels verschijnen als verbonden groene stippen die mogelijke paden vertegenwoordigen. Terwijl BLIND van punt naar punt stapt, keurt of verwerpt de mens elke beweging om het pad te verfijnen en obstakels zo efficiënt mogelijk te vermijden.
Het is een gemakkelijke interface voor mensen om te gebruiken, omdat zij kunnen zeggen: "Ik vind dit leuk" of "Ik vind dit niet leuk". De robot gebruikt deze informatie om te plannen. Als hij is gevoed met een goedgekeurde reeks bewegingen, kan de robot zijn taak uitvoeren.
Wiskunde
Een van de belangrijkste dingen is, dat menselijke voorkeuren moeilijk te beschrijven zijn met een wiskundige formule. Het werk aan Rice University vereenvoudigt mens-robot-relaties door menselijke voorkeuren op te nemen. Op die manier zullen applicaties het meeste profijt hebben van dit werk.
Het onderzoek is een voorbeeld van hoe een kleine, maar gerichte, menselijke tussenkomst de mogelijkheden van robots om complexe taken uit te voeren aanzienlijk kan verbeteren. Dit geldt voor omgevingen waarvan sommige onderdelen volledig onbekend zijn voor de robot, maar wel bekend bij de mens. Het laat zien hoe methoden voor mens-robot-interactie en geautomatiseerde planning kunnen samensmelten om betrouwbare oplossingen te leveren die ook de menselijke voorkeuren respecteren.
Foto: Kavraki Lab, Rice University