
30/01/2023
Door Ad Spijkers
Onderzoekers aan Tampere University onderzoeken hoe slim materiaal te laten vliegen.
De ontwikkeling van op prikkels reagerende polymeren heeft geleid tot een schat aan materiaal-gerelateerde mogelijkheden voor de volgende generatie kleinschalige, draadloos bestuurde robots met een zacht lichaam. Al geruime tijd weten ingenieurs hoe ze deze materialen kunnen gebruiken om kleine robots te maken die kunnen lopen, zwemmen en springen. Maar tot nu toe heeft niemand ze kunnen laten vliegen.
Onderzoekers aan Tampere University onderzoeken hoe slim materiaal te laten vliegen. Ze hebben een nieuw ontwerp bedacht voor hun project genaamd Fairy Flying Aero-robots, gebaseerd op Light Responsive Materials Assembly. Ze hebben een polymeer assemblagerobot ontwikkeld die door de wind vliegt en wordt bestuurd door licht.
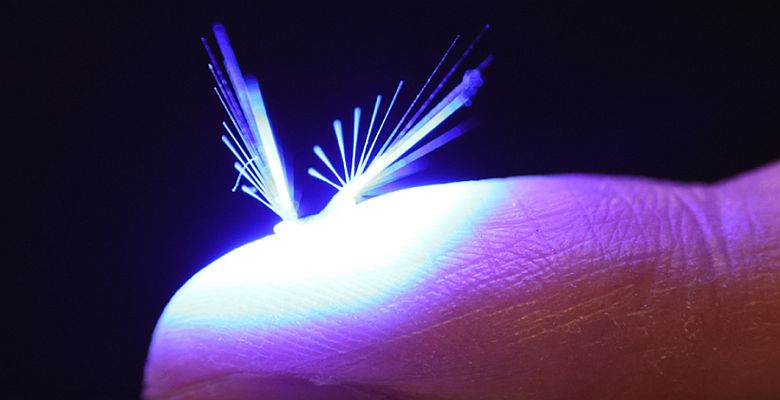
Dit 'kunstzaad' is volgens de onderzoekers superieur aan zijn natuurlijke tegenhangers en voorzien van een zachte actuator. Deze is gemaakt van op licht reagerend vloeibaar kristallijn elastomeer, dat de borstelharen opent of sluit bij excitatie van zichtbaar licht.
Besturing door licht
De kunstmatige fee heeft verschillende bio-mimetische kenmerken. Vanwege zijn hoge porositeit (0,95) en lichtgewicht (1,2 mg) structuur, kan de microrobot gemakkelijk zweven en door de wind worden geleid. Bovendien maakt een stabiele, gescheiden vortexring-generatie reizen met windondersteuning over lange afstanden mogelijk. De fee kan worden aangedreven en bestuurd door een lichtbron, zoals een laserstraal of led.
Dit betekent dat licht kan worden gebruikt om de vorm van de kleine paardenbloemzaadachtige structuur te veranderen. De fee kan zich handmatig aanpassen aan de windrichting en -kracht door van vorm te veranderen. Om de start- en landingsacties van het polymeersamenstel te regelen, kan een lichtstraal worden gebruikt.
Potentiële toepassingsmogelijkheden
De onderzoekers gaan zich nu richten op het verbeteren van de materiaalgevoeligheid om het apparaat in zonlicht te laten werken. Bovendien zullen ze de structuur opschalen zodat deze zowel micro-elektronische apparaten zoals GPS en sensoren als biochemische verbindingen kan dragen. En volgens de onderzoekers is er potentieel voor significante toepassingen. De 'proof of concept' experimenten die in het onderzoek zijn opgenomen, tonen aan dat de robot een belangrijke stap kan vormen naar realistische toepassingen die geschikt zijn voor kunstmatige bestuiving.
In de toekomst zouden miljoenen kunstmatige paardebloemzaden die stuifmeel bevatten, vrij kunnen worden verspreid door natuurlijke winden en vervolgens door licht worden gestuurd naar specifieke gebieden met bomen die wachten op bestuiving. Dit zou een enorme impact hebben op de wereldwijde landbouw, aangezien het verlies van bestuivers (insecten) als gevolg van de opwarming van de aarde een ernstige bedreiging is geworden voor de biodiversiteit en de voedselproductie.
Er moeten echter eerst veel problemen worden opgelost. Hoe controleer je bijvoorbeeld de landingsplek nauwkeurig? Hoe hergebruik je de apparaten en maak je ze biologisch afbreekbaar? Deze kwesties vereisen nauwe samenwerking van materiaalwetenschappers en mensen die aan microrobotica werken.
Foto: Jianfeng Yang / Tampere University