
12/10/2022
Door Ad Spijkers
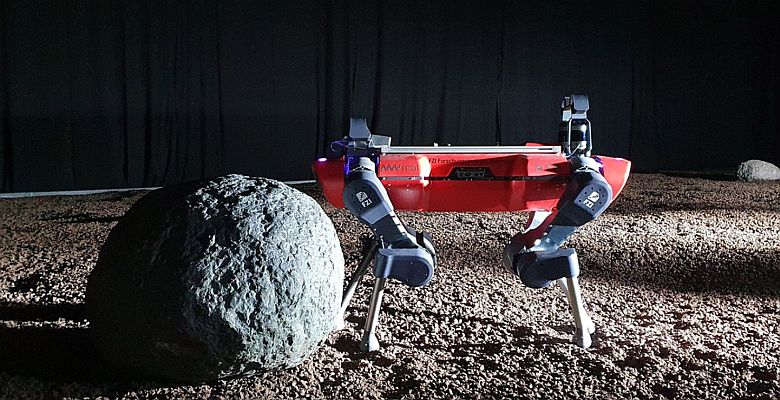
De Leap rover is gebaseerd op ANYmal, de robot met poten die is ontwikkeld aan de ETH Zürich en diens spin-off Anybotics.
Een door kunstmatige intelligentie getrainde vierbenige robot heeft dezelfde les geleerd als de Apollo-astronauten: springen kan de beste manier zijn om op het oppervlak van de maan te bewegen. Leap (Legged Exploration of the Aristarchus Plateau) is een door de ESA gefinancierd missieconceptonderzoek om enkele van de meest uitdagende maanterreinen te verkennen.
Robot naar de maan
"Het doel van Leap is het Aristarchus-plateau, een gebied van de maan dat rijk is aan geologische kenmerken, maar moeilijk toegankelijk is", aldus Patrick Bambach van het Max-Planck-Institut für Sonnensystemforschung in Göttingen. "Met de robot kunnen we belangrijke kenmerken onderzoeken om de geologische geschiedenis en evolutie van de maan te bestuderen. Voorbeelden zijn de ejecta rond kraters, nieuwe inslagplaatsen en ingestorte lavabuizen, waar materiaal mogelijk niet is veranderd door ruimteverwering en andere processen."
Het Leap-team werkt eraan om de robot te integreren in ESA's European Large Logistic Lander (EL3), die volgens de planning van eind 2020 tot begin 2030 meerdere keren op de maan zal landen. Leap is gebaseerd op de vierbenige robot ANYmal, die is ontwikkeld aan de Eidgenössische Technische Hochschule Zürich (ETH) en zijn spin-off Anybotics. Het systeem wordt momenteel aangepast aan de maanomgeving door een consortium van ETH Zürich, het Max Planck Institute für Sonnensysteemforschung, technologiebedrijf OHB in Bremen, de Universität Münster en de Open Universiteit.
Het huidige ontwerp blijft onder de 50 kg en omvat 10 kg wetenschappelijke nuttige lading, die theoretisch multispectrale sensoren, grondradar, massaspectrometers, gravimeters en andere instrumenten kan dragen. Het vermogen van Leap om geselecteerde monsters te verzamelen en naar een maanlander te brengen, biedt extra mogelijkheden voor retourmissies in uitdagende omgevingen op de maan of Mars.
Mogelijkheden
Traditionele rovers hebben grote ontdekkingen op de maan en Mars mogelijk gemaakt, maar hebben beperkingen. Het verkennen van terrein met losse grond, grote rotsblokken of hellingen van meer dan 15° is bijzonder uitdagend met wielen. De missie van Marsrover Spirit bijvoorbeeld werd beëindigd toen hij vast kwam te zitten in het zand.
ANYmal kan in verschillende loopgangen bewegen, waardoor de robot in korte tijd grote afstanden kan afleggen, steile hellingen kan beklimmen, wetenschappelijke instrumenten kan inzetten en zelfs kan herstellen in het onwaarschijnlijke geval van een val. De robot kan ook zijn poten gebruiken om kanalen in de grond te graven, keien of kleinere rotsen om te draaien voor verdere inspectie en monsters op te nemen.
Aanvankelijk is de robot getraind met behulp van een Reinforcement Learning /aanpak in een virtuele omgeving om het maanterrein, de zwaartekracht en de stofeigenschappen te simuleren. Hij is ook ingezet in het veld voor een buitenwandeling. Interessant is dat ANYmal een springachtige manier van voortbewegen begon te gebruiken, net zoals de Apollo-astronauten dat deden, zich realiserend dat springen zuiniger met energie kan zijn dan lopen.
Foto: ETH Zürich/Robotics System Lab (RSL)