
10/07/2023
Door Ad Spijkers
Wetenschappers vergeleken echte en robotinsecten om beter te begrijpen hoe insecten krachten in hun ledematen voelen tijdens het lopen.
Campaniform sensilla (CS) zijn krachtreceptoren die worden aangetroffen in de ledematen van insecten. De receptoren reageren op stress en spanning en verschaffen vvoor het beheersen van de voortbeweging. Soortgelijke krachtreceptoren bestaan bij zoogdieren (Golgi-peesorganen). Dat doet vermoeden dat het begrijpen van de rol van krachtsensoren bij insecten ook nieuwe inzichten kan opleveren in hun functies bij gewervelde dieren zoals mensen.
Sensoren en actuatoren
Onderzoekers aan West Virginia University in Morgantown (120 km zuidelijk van Pittsburgh) bestuderen de rol van krachtsensoren bij wandelende insecten. Deze sensoren zijn belangrijk voor een succesvolle voortbeweging. De terugkoppeling die ze geven is van cruciaal belang voor een juiste houding en coördinatie. Het onderzoek geeft nieuwe inzichten in de biomechanica en neurale dynamiek van insecten en maakt nieuwe toepassingen voor robots met grote poten mogelijk.
De voordelen van het bouwen van robotmodellen ten opzichte van computermodellen zijn onder meer een meer realistische modellering van wrijving tussen bewegende delen en het opnemen van vertragingen om neurale signalen te verzenden. Robotledematen hebben het voordeel dat ze elk signaal afzonderlijk verzenden en ontvangen en de daaruit voortvloeiende mechanische acties kunnen registreren, wat bij dieren niet mogelijk is.
Twee robots
Lopen is een inherent mechanische taak, dus het begrijpen van het lopen vereist tegelijkertijd onderzoek naar mechanica en neurale controle. Goed functionerende looprobots kunnen dienen als prototypes voor machines die mensen kunnen helpen op extreme terreinen te exploiteren, andere planeten te verkennen of door bossen te wandelen om hun gezondheid te controleren.
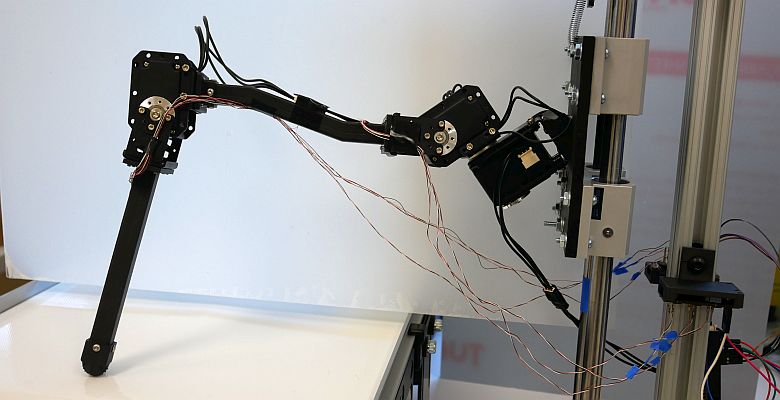
Bij het onderzoek zijn twee robots betrokken. De eerste is een biomimetische robot, gebaseerd op de fruitvlieg (Drosophila melanogaster) die op zes poten loopt. Hiermee kunnen de onderzoekers een compleet beeld krijgen van hoe campaniform sensilla krachten tijdens het lopen bewaakt. De andere robot is een enkele poot (foto), waardoor een vereenvoudigde simulatie van de zintuiglijke ervaring van één insectenpoot tijdens het lopen mogelijk is.
De wetenschappers onderzoeken ook de rol van CS-krachten in echte insecten door hun ledematen te isoleren en sensorische paden te bewaken met elektroden wanneer verschillende krachten worden uitgeoefend. Deze geregistreerde sensorische signalen worden vervolgens gebruikt om modellen voor de robotbenen te ontwikkelen.
Resultaten
Door hun reactie op veel verschillende signalen vast te leggen, kunnen de onderzoekers een duidelijker beeld schetsen hoe ze krachten omzetten in neurale activiteit. Ze gebruiken veel verschillende stimuli omdat de CS dynamisch zijn en zich altijd aanpassen aan de toegepaste krachten.
Het onderzoek heeft sterke correlaties onthuld tussen echte insecten en hun robotachtige tegenhangers. De wetenschappers vinden dat voor elke insectensoort die ze controleren, hun model even goed is uitgerust om de manier te beschrijven waarop de CS krachten omzetten in neurale activiteit. Dit suggereert dat de organen van elke soort in grote lijnen op dezelfde manier functioneren.
Foto: Dr. Nicholas Szczecinski, West Virginia University