
26/06/2024
Door Ad Spijkers
Het DFKI in Bremen heeft innovatieve besturingsmethoden ontwikkeld voor complexe systemen.
Recente ontwikkelingen op het gebied van robotica op basis van data-gestuurde kunstmatige intelligentie openen een breed scala aan praktische toepassingen. Het garanderen van de veiligheid van deze applicaties blijft echter een belangrijke uitdaging. Het Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI) in Bremen heeft daarom innovatieve besturingsmethoden ontwikkeld voor complexe systemen. Ze combineren de voordelen van snel leren met de betrouwbaarheid van wiskundige verificatie. Deze hybride AI-aanpak biedt een oplossing voor de uitdagingen van moderne robotica.
AI als basis
Met de vooruitgang op het gebied van sub-symbolische AI zoals deep learning worden de beperkingen van op data gebaseerde methoden op het gebied van veiligheid en betrouwbaarheid steeds duidelijker. Beslissingen die met behulp van machine learning worden genomen, zijn niet gebaseerd op symbolische berekeningen. Ook kunnen ze niet worden verklaard door logische regels en daarom niet wiskundig bewezen. Vooral op veiligheidskritische gebieden zoals humanoïde robotica is controleerbaarheid echter cruciaal om het risico op storingen te minimaliseren en een veilige omgeving te garanderen.
Als onderdeel van het 'VeryHuman' project hebben wetenschappers van het DFKI een innovatieve aanpak ontwikkeld die sub-symbolische en symbolische AI-methoden combineert. Concreet gebruikten ze symbolische specificaties bij reinforcement learning, waarbij een systeem wordt beloond voor wiskundig verifieerbare resultaten. Het doel is om een op AI gebaseerd besturingssysteem voor humanoïde robots te ontwikkelen dat mensachtige vaardigheden kan bereiken, zoals veilig en stabiel lopen of andere complexe bewegingen.
Kinematische modellen
Door symbolische specificaties te gebruiken, zoals een eenvoudige taal om robotgedrag te beschrijven, slaagde het projectteam erin abstracte kinematische modellen te creëren die wiskundig kunnen worden geverifieerd. Deze abstracties definiëren beloningsfuncties voor reinforcement learning waardoor de robot zijn beslissingen kan verifiëren aan de hand van de modellen. Dit vergroot de betrouwbaarheid van beslissingen, zorgt voor stabiele en voorspelbare robotbewegingen en minimaliseert het risico op wangedrag of onverwachte acties.
Daarnaast werd het gewenste robotgedrag gemodelleerd als een hybride automaat, een wiskundig model dat zowel continu als discreet gedrag beschrijft. Dit verkleint de toestandsruimte van het systeem, waardoor efficiënter leren mogelijk wordt.
Snel dynamisch rennen
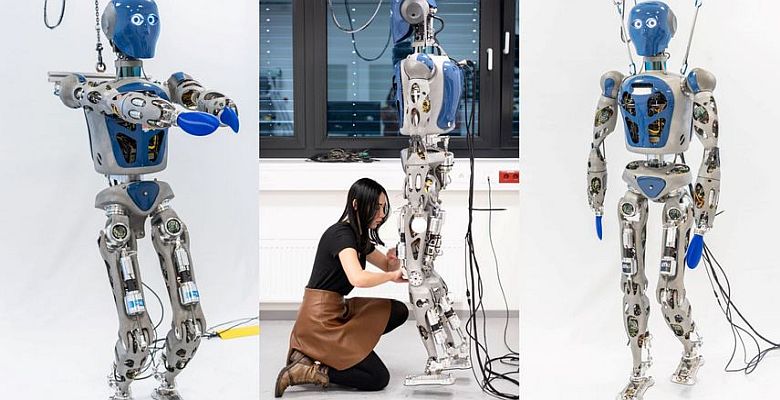
Als onderdeel van het project zijn de onderzoekers er in geslaagd dynamisch hardlopen te realiseren met de humanoïde robot RH5 van het instituut. Om dit te doen, combineerden ze de nulmomentpunt-methode (het punt op de voetafdruk van een robot waar de resulterende grondkracht geen kantelmoment produceert) met de benadering van controle over het hele lichaam. Deze combinatie maakt het mogelijk de stabiliteit en prestaties van positiegestuurde robots te maximaliseren. Op deze manier kan robuust dynamisch hardlopen met verschillende snelheden en paslengtes worden bereikt, terwijl de systeemlimieten op het gebied van zowel snelheid als bewegingsbereik effectief worden benut.
Volgens de onderzoekers is dit de eerste keer dat een mensachtige robot dynamisch loopt met een snelheid tot 0,43 m/s (1,55 km/u). Afgezien van systemen met actieve teengewrichten is RH5 een van de snelste mensachtigen van vergelijkbare grootte en aandrijfmodaliteiten. Om het gedrag van de robot verder te verbeteren, gebruikte het team bovendien simulatie- en optimale besturingsalgoritmen op basis van het symbolische model van het systeem.
Het nauwkeurig modelleren en optimaliseren van bewegingssequenties vergroot zowel de veiligheid als de efficiëntie van robots. De hybride AI-aanpak die in het project is ontwikkeld, kan als blauwdruk dienen voor het genereren van beloningsfuncties op basis van symbolische, op logica gebaseerde AI. Dit is vooral relevant voor toepassingen waarbij de systemen of hun storingen een potentieel gevaar voor mensen vormen.
Foto: DFKI, Annemarie Popp