
09/08/2024
Door Ad Spijkers
SimPLE leert objecten op te pakken, opnieuw vast te pakken en te plaatsen met behulp van het computerondersteunde ontwerpmodel van de objecten.
Pick-and-place-machines worden gebruikt om objecten op gestructureerde, georganiseerde locaties te plaatsen. Ze worden gebruikt voor toepassingen van elektronica-assemblage tot verpakking, bin picking en zelfs inspectie, maar veel huidige pick-and-place-oplossingen zijn beperkt. Huidige oplossingen missen het vermogen om veel taken op te lossen zonder afbreuk te doen aan de nauwkeurigheid.
Nieuwe benadering
De industrie gebruikt vaak op maat gemaakte oplossingen voor het specifieke probleem dat ze hebben. Dat vergt veel engineering en niet veel flexibiliteit in termen van de oplossing. Een team van het Massachusetts Institute of Engineering in Cambridge (bij Boston) onderzoekt pick-and-place-oplossingen met meer precisie. SimPLE (Simulation to Pick Localize and placE ) biedt een oplossing voor pick-and-place die flexibel is en toch de benodigde precisie biedt.
Bij nauwkeurige pick-and-place, ook bekend als kitting, transformeert de robot een ongestructureerde opstelling van objecten in een georganiseerde opstelling. De aanpak, genaamd SimPLE (Simulation to Pick Localize and placE), leert objecten op te pakken, opnieuw vast te pakken en te plaatsen. Dit gebeurt met behulp van het computer-aided design (CAD) model van het object en zonder eerdere ervaring met de specifieke objecten.
Visuotactiele detectie
SimPLE belooft veel verschillende taken te kunnen oplossen met dezelfde hardware en software. Dit is mogelijk met behulp van simulatie om modellen te leren die zich aanpassen aan elke specifieke taak. Het laat zien dat het mogelijk is om de niveaus van positienauwkeurigheid te bereiken die vereist zijn voor veel industriële pick-and-place-taken zonder enige andere specialisatie.
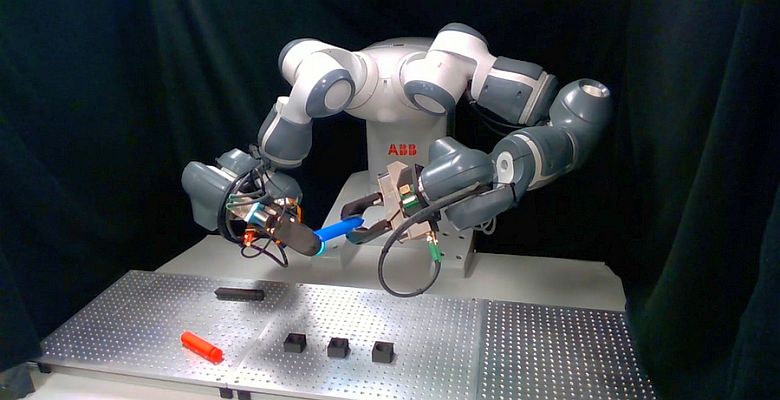
Met behulp van een robot met twee armen, voorzien van visuotactiele detectie, gebruikt de SimPLE-oplossing drie hoofdcomponenten: taakbewust grijpen, perceptie door zicht en aanraking (visuotactiele perceptie) en regrasp-planning. De 'echte' observaties worden vergeleken met een set gesimuleerde observaties door middel van supervised learning. Hierdoor kan een verdeling van waarschijnlijke objectposities worden geschat en plaatsing bereikt. In experimenten heeft SimPLE aangetoond dat het diverse objecten kan oppakken en plaatsen. De objecten bestrijken een breed scala aan vormen. Voor zes objecten werden in 90% van de gevallen succesvolle plaatsingen bereikt, voor elf objecten meer dan 80%.
Er is een intuïtief begrip in de roboticagemeenschap dat zowel zicht als aanraking nuttig zijn. Maar tot nu toe zijn er niet veel demonstraties geweest van hoe het nuttig deze kunnen zijn voor complexe roboticataken. Het meeste onderzoek aan grijpen negeert de taken die erop volgen. Dit onderzoek gaat verder dan de wens om mensen na te bootsen. Het toont vanuit een strikt functioneel oogpunt het nut van het combineren van tactiele waarneming en zicht met twee handen.
GOFE
De nu gepresenteerde methodologie voor handling met behulp van robots kan een waardevol alternatief zijn voor de trend richting AI en machine learning methoden. De auteurs combineren geometrische algoritmen die een hoge precisie kunnen bereiken voor een specifieke set objectvormen. Ze laten zien dat de combinatie met vision de prestaties aanzienlijk kan verbeteren ten opzichte van AI-methoden. Dit kan direct nuttig zijn in de industrie en is een uitstekend voorbeeld van wat een niet bij het onderzoek betrokken wetenschapper 'good gold fashioned engineering' (GOFE) noemt.
Om te laten zien hoe vision en aanraking samen nuttig kunnen zijn, is het noodzakelijk om een volledig robotsysteem te bouwen. Dat is dat voor één persoon in een korte tijdshorizon heel moeilijk. Alleen samenwerking over verschillende generaties en onderzoeksinstellingen heen maakte het mogelijk om een end-to-end systeem te bouwen.
Foto: John Freidah, MIT Department of Mechanical Engineering