
24/01/2023
Door Ad Spijkers
Amerikaanse en Britse onderzoekers hebben robots ter grootte van een kniptor ontwikkeld die klein genoeg zijn om in krappe ruimtes te passen.
Onderzoekers onder leiding van de University of Illinois in Urbana-Champaign (zo'n 200 km zuidelijk van Chicago) hebben een stap voorwaarts gemaakt in de ontwikkeling van springende robots ter grootte van een insect. Deze kunnen taken uitvoeren in de kleine ruimtes die vaak worden aangetroffen in mechanische, agrarische en zoek- en reddingsomgevingen. De onderzoekers demonstreerden een reeks robots ter grootte van kniptorren die klein genoeg zijn om in krappe ruimtes te passen. Ze zijn krachtig genoeg om over obstakels te manoeuvreren en snel genoeg om de snelle ontsnappingstijd van een insect te evenaren.
Uitdagingen
Samen met onderzoekers aan Princeton University (90 km zuideoostelijk van New York City) hebben de wetenschappers in Illinois de afgelopen tien jaar de anatomie, mechanica en evolutie van de kniptor bestudeerd. Aan dit onderzoek namen ook wetenschappers van University of Birmingham, Oxford University en de University of Texas (Dallas) deel.
Uit een onderzoek uit 2020 bleek dat het snel vrijkomen van elastische energie het gevolg is van een opgerolde spier in de thorax van een klikkever die wordt geactiveerd. Door de kracht kunnen de insecten zich vele malen hun eigen lichaamslengte in de lucht voortbewegen. Dit doen ze als middel om zichzelf overeind te houden als ze op hun ruggen belanden en om aan belagers te ontsnappen.
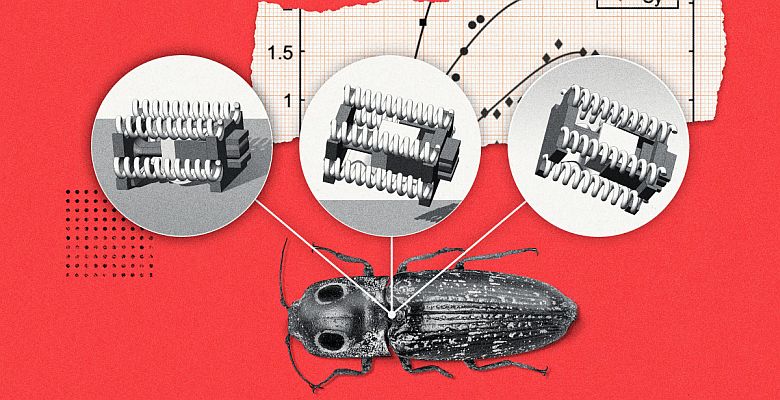
Een van de grote uitdagingen van kleinschalige robotica is het vinden van een ontwerp dat klein is, maar toch krachtig genoeg om obstakels te omzeilen of snel uit gevaarlijke omgevingen te ontsnappen. In de studie gebruikten de onderzoekers kleine opgerolde actuatoren – analoog aan spieren van dieren – die aan een balkvormig mechanisme trekken. Hierdoor knikt dit langzaam en slaat elastische energie op totdat die spontaan wordt vrijgegeven en versterkt. Hierdoor worden de robots omhoog gestuurd.
Dit proces, een dynamische knikcascade genoemd, is eenvoudig vergeleken met de anatomie van een kniptor. Eenvoud is in dit geval echter goed, omdat de onderzoekers hierdoor op deze kleine schaal kunnen werken en onderdelen kunnen maken.
Ontwikkeling
Op basis van de biologische evolutie en wiskundige modellen bouwden en testten de onderzoekers vier apparaatvariaties, waarbij ze uitkwamen op twee configuraties die met succes kunnen springen zonder handmatige tussenkomst. Voor de toekomst hebben ze geen vaste benadering voor het exacte ontwerp van de volgende generatie van deze robots. De studie plant wel een zaadje in de evolutie van deze technologie, een proces vergelijkbaar met biologische evolutie.
De onderzoekers stellen zich voor dat de robots toegang krijgen tot krappe ruimtes om onderhoud uit te voeren aan grote machines zoals turbines en straalmotoren, bijvoorbeeld door foto's te maken om problemen te identificeren. Ze stellen zich ook voor dat robots op insectenschaal nuttig zijn in de moderne landbouw. Wetenschappers en boeren gebruiken momenteel drones en voertuigen om gewassen te bewaken, maar soms hebben ze een sensor nodig om een plant aan te raken of een foto te maken van een kleinschalig object. Robots op insectenschaal kunnen dat.
Ill.: Michael Vincent