
13/12/2021
Door Ad Spijkers
Ingenieurs van het California Institute of Technology (Caltech), de Eidgenössische Technische Hochschule Zürich (ETH) en Harvard University ontwikkelen kunstmatige intelligentie (AI) waarmee autonome drones oceaanstromingen kunnen gebruiken om te navigeren.
Als onderzoekers willen dat robots de diepe oceaan verkennen, vooral in zwermen, is het bijna onmogelijk om op 6000 m afstand voet aan de oppervlakte met een joystick te besturen. De gebruikers kunnen de robots ook geen data verstrekken over de lokale oceaanstromingen. De robots hebben die nodig om te navigeren, maar operators kunnen ze niet vanaf het oppervlak detecteren. In plaats daarvan zijn onderwatervaartuigen nodig om beslissingen te kunnen nemen over hoe ze voor zichzelf kunnen bewegen.
AI in kleine vaartuigen
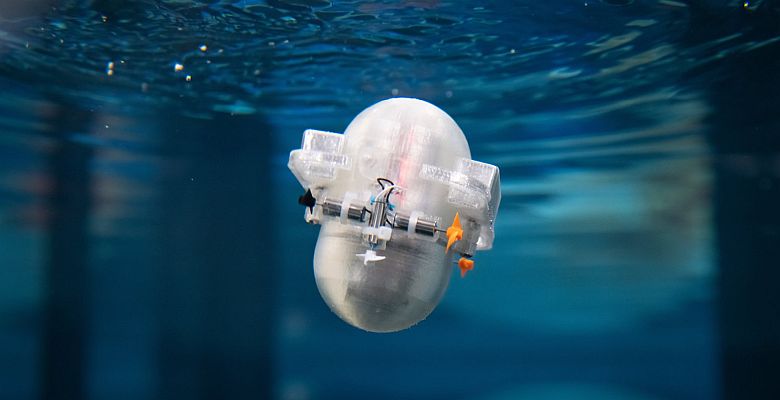
De prestaties van de AI zijn getest met behulp van computersimulaties, maar het ontwikkelingsteam heeft ook een kleine robot ter grootte van een hand ontwikkeld. Deze voert het algoritme uit op een kleine computerchip die onderwatervaartuigen op aarde en andere planeten kan aansturen.
Het doel is, een autonoom systeem te creëren om de toestand van de oceanen van de planeet te volgen. Dit kan bijvoorbeeld door het algoritme te gebruiken in combinatie met hulpmiddelen die ze eerder ontwikkelden om kwallen sneller en op commando te laten zwemmen. Volledig mechanische robots die het algoritme uitvoeren, kunnen zelfs oceanen op andere werelden verkennen, zoals Enceladus (maan van Saturnus) of Europa (maan van Jupiter).
In beide scenario's zouden vaartuigen zelf beslissingen moeten kunnen nemen over waar te gaan en de meest efficiënte manier om daar te komen. Om dit te doen, hebben ze waarschijnlijk alleen gegevens beschikbaar die ze zelf kunnen verzamelen - informatie over de waterstromingen die ze momenteel ervaren.
Reinforcement learning
Om deze uitdaging aan te gaan, pasten onderzoekers reinforcement learning netwerken toe. Deze kunnen ze op kleine computers draaien. Voor dit project schreef het team software die kan worden geïnstalleerd en uitgevoerd op een Teensy. Dit is een microcontroller van 61 mm x 18 mm die minder dan $ 30 kost bij Amazon en genoeg heeft aan 0,5 W.
De onderzoekers deden computersimulatie waarin stroming langs een obstakel in water verschillende draaikolken creëerde die in tegengestelde richtingen bewogen. Het team leerde de AI zodanig te navigeren dat het profiteerde van regio's met lage snelheid in de nasleep van de draaikolken om met minimaal energieverbruik naar de bestemming te navigeren.
Om de navigatie te vergemakkelijken, had het gesimuleerde voertuig alleen toegang tot informatie over de waterstromingen op zijn directe locatie. Maar het leerde al snel hoe het draaikolken moest benutten om naar het gewenste doel te komen. In een fysieke robot zou de AI op dezelfde manier alleen toegang hebben tot informatie die kan worden verzameld van een ingebouwde gyroscoop en versnellingsmeter. Dit zijn voor een robotplatform zowel relatief kleine als goedkope sensoren.
Vooruitzichten
Dit soort navigatie is analoog aan de manier waarop adelaars en haviken thermiek in de lucht gebruiken. Zij halen energie uit luchtstromen om met een minimum aan energieverbruik naar een gewenste locatie te manoeuvreren. Verrassend genoeg ontdekten de onderzoekers dat hun algoritme navigatiestrategieën zou kunnen leren die zelfs effectiever zijn dan die waarvan wordt aangenomen dat ze worden gebruikt door echte vissen in de oceaan.
De technologie staat nog in de kinderschoenen. Momenteel wil het team de AI testen op elk ander type stromingsverstoring die het mogelijk zou tegenkomen tijdens een missie in de oceaan. Te denken valt bijvoorbeeld aan draaikolken versus getijdenstromingen. Doel is om de effectiviteit ervan te beoordelen in het echt.
Door hun kennis van oceaanstromingsfysica op te nemen in de leerstrategie voor versterking, proberen de onderzoekers deze beperking te overwinnen. Het huidige onderzoek bewijst de potentiële effectiviteit van reinforcement learning netwerken bij het aangaan van deze uitdaging, vooral omdat ze op kleine apparaten kunnen draaien.
Vervolg
Om dit in het veld te proberen, plaatst het team de Teensy op een op maat gemaakt vaartuig dat die de CARL-Bot wordt genoemd(Caltech Autonomous Reinforcement Learning Robot). De CARL-Bot zal worden gedropt in een nieuw gebouwde twee verdiepingen hoge watertank op de campus van Caltech en zal worden geleerd om door de stromingen van de oceaan te navigeren.
Niet alleen de robot zal leren, maar ook de mensheid zal leren over oceaanstromingen en hoe we er doorheen kunnen navigeren.
Foto: Caltech