
09/12/2024
Door Ad Spijkers
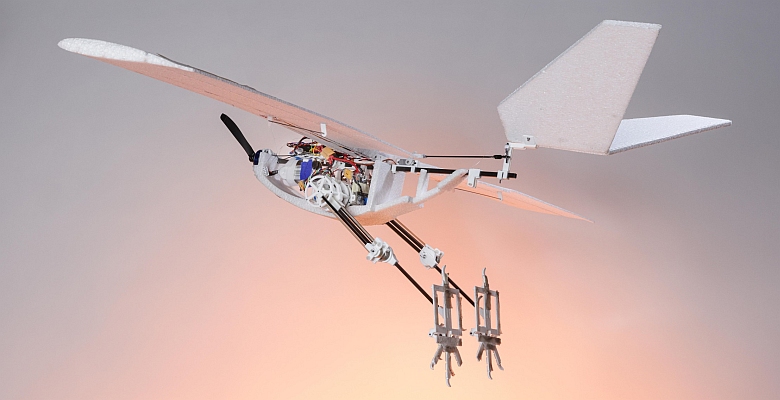
Onderzoekers aan de EPFL hebben een drone gebouwd die kan lopen, huppelen en in de lucht kan springen.
'In vogelvlucht' is een veelgebruikte uitdrukking die verwijst naar de kortste afstand tussen twee punten. Onderzoekers aan de École Polytechnique Fédérale de Lausanne (EPFL) hebben de uitdrukking letterlijk genomen met Raven (Robotic Avian-inspired Vehicle for multiple ENvironments). Hun drone is ontworpen op basis van vogels zoals raven en kraaien die vaak wisselen tussen lucht en land. Dankzij de multifunctionele robotbenen kan het luchtvaartuig autonoom opstijgen in omgevingen die voorheen ontoegankelijk waren voor gevleugelde drones.
Optimalisatie
Vogels waren en zijn de inspiratie voor vliegtuigen en de gebroeders Wright maakten deze droom waar. Maar zelfs de modernste vliegtuigen zijn nog steeds ver verwijderd van wat vogels kunnen. De gevleugelde dieren kunnen van lopen naar rennen naar de lucht en weer terug, zonder de hulp van een landingsbaan of lanceerinrichting. Technische platforms voor dit soort bewegingen ontbreken nog steeds in de robotica.
Het ontwerp van Raven is gericht op het maximaliseren van de gangdiversiteit en het minimaliseren van de massa. Geïnspireerd door de verhoudingen van vogelpoten (en langdurige observaties van kraaien op de campus van EPFL), ontwierpen de onderzoekers een set aangepaste, multifunctionele vogelpoten voor een drone met vaste vleugels. Ze gebruikten een combinatie van wiskundige modellen, computersimulaties en experimentele iteraties om een optimale balans te bereiken tussen de complexiteit van de poten en het totale gewicht van de drone (0,62 kg).
De resulterende poot houdt zwaardere componenten dicht bij het 'lichaam', terwijl een combinatie van veren en motoren krachtige vogelpezen en -spieren nabootst. Lichtgewicht, door vogels geïnspireerde voeten, samengesteld uit twee gelede structuren, maken gebruik van een passief elastisch gewricht dat verschillende houdingen ondersteunt voor lopen, huppelen en springen.
Lopen of springen
Het vertalen van vogelpoten en -voeten naar een lichtgewicht robotsysteem leverde ontwerp-, integratie- en controleproblemen op die vogels in de loop van de evolutie elegant hebben opgelost. Dit bracht de onderzoekers niet alleen tot de meest multimodale gevleugelde drone tot nu toe. Ze konden ook de energetische efficiëntie van springen om op te stijgen bij zowel vogels als drones belichten.Lopen of vliegen
Eerdere robots die waren ontworpen om te lopen maar waren te zwaar om te springen. Robots die waren ontworpen om te springen, hadden geen voeten die geschikt waren om te lopen. Door het ontwerp kan Raven lopen, gaten in het terrein overbruggen en zelfs op een verhoogd oppervlak van 26 cm hoog springen.
De wetenschappers experimenteerden ook met verschillende manieren om de vlucht te initiëren, waaronder staand en vallend opstijgen. Ze ontdekten dat springen in de vlucht het meest efficiënte gebruik maakte van kinetische energie (snelheid) en potentiële energie (hoogtewinst). De onderzoekers werkten samen met de University of California in Irvine om de biomechanica van vogels aan te passen aan robotachtige voortbeweging.
Resultaten
De resultaten geven inzicht in de kosten en baten van krachtige poten bij vogels die vaak van lucht naar grond gaan. Ook zorgden ze voor een lichtgewicht ontwerp voor gevleugelde drones die zich op ruw terrein kunnen verplaatsen en vanaf beperkte locaties kunnen opstijgen zonder menselijke tussenkomst. Deze mogelijkheden maken het gebruik van dergelijke drones mogelijk bij inspectie, rampenbestrijding en levering in beperkte ruimtes. Het EPFL-team werkt al aan een verbeterd ontwerp en controle van de poten om de landing in verschillende omgevingen te vergemakkelijken.
Vleugels van vogels zijn het equivalent van voorpoten bij landdieren met vier poten. Maar er is weinig bekend over de coördinatie van poten en vleugels bij vogels – om nog maar te zwijgen van drones. De resultaten vormen slechts een eerste stap naar een beter begrip van ontwerp- en controleprincipes van multimodale vliegende dieren en hun vertaling naar wendbare en energiek efficiënte drones.
De wetenschappelijke publicatie vindt u hier.
Foto: Alain Herzog