
07/08/2024
Door Ad Spijkers
Net als vissen en insecten kunnen flapperende robots hun bewegingen zelf herstellen met behulp van machine learning.
Mensen die machines maken nemen dieren vaak als voorbeeld. Zo hebben ze vliegtuigen ontworpen met vleugels en boten met vinvormige roeren. De afgelopen decennia hebben onderzoekers van Caltech in Pasadena en elders bio-geïnspireerde techniek onderzocht. Ze wilden weten of andere natuurlijke vormen van beweging de werktuigbouwkunde zouden kunnen beïnvloeden.
Flapperende robot
Veel dieren 'flapperen' als voortstuwingsmiddel. Robots die zijn uitgerust met flappers (zoals al gebruikt in de glastuinbouw) kunnen zichzelf ook efficiënt voortbewegen. Maar de vinnen en vleugels van vissen en insecten hebben nog een trucje in petto. Zelfs met beschadigde lichaamsdelen kunnen ze de mechanica van hun bewegingen aanpassen om dit te compenseren. Sommige vissoorten kunnen nog zwemmen en overleven met 76% van hun vinnen beschadigd.
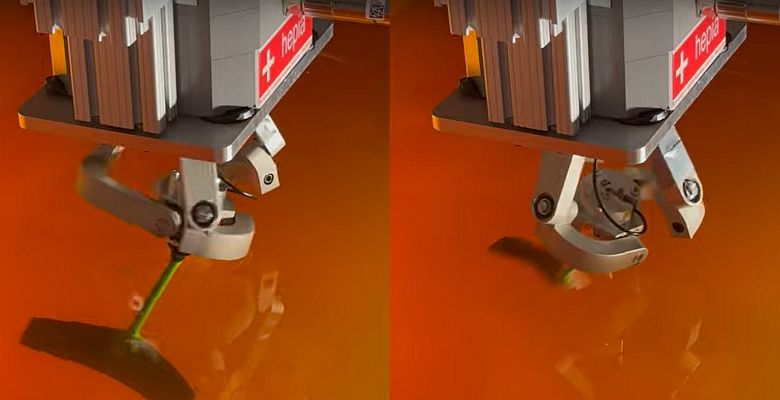
Zou een flapperende robot dezelfde prestatie kunnen leveren? Dit is de vraag die een onderzoek inspireerde waarbij de bewegingen van een flapperende robot in een tank met olie (links op de foto en video). Dit medium maakt wat nauwkeurigere metingen mogelijk dan water wegens de signaal-ruisverhouding. Vervolgens amputeerden ze een deel van de flapper van de robot (rechts). Zonder tussenkomst zou de robot zinloos flapperen in de tank, omdat hij zijn zwemvermogen verloren had. Maar behalve bio-geïnspireerde voortstuwing gaven de onderzoekers de robot ook bio-geïnspireerde aanpassing.
Machine Learning
Na een verwonding proberen vissen en insecten zichzelf op nieuwe manieren voort te bewegen. Dit doen ze door te experimenteren totdat ze een slagmechanica vinden die hen weer volledig actief kan maken. Om dit na te bootsen, werd de robot geprogrammeerd om herhaalde proeven van verschillende slagmechanica uit te voeren, die vervolgens werden geëvalueerd door middel van machine learning. Uiteindelijk bereikte de robot, net als een gewonde vis of insect, een succesvolle alternatieve vorm van voortstuwing met zijn beschadigde flapper, zelfs toen 50% ervan was verwijderd.
De robot probeerde op tien verschillende manieren te zwemmen. De krachten terwijl hij in de olietank zwemt, worden gemeten, zodat de onderzoekers zowel de krachtproductie als de efficiëntie ervan konden vergelijken. Het algoritme voor machine learning selecteert de beste mogelijke trajecten op basis van hoe goed ze de gewenste kracht produceerden. Het algoritme komt vervolgens met een andere set van tien trajecten die zijn geïnspireerd op de vorige set. Dit leerproces - evaluatie, aanpassing en creatie - herhaalt zich totdat de beste kandidaten allemaal min of meer hetzelfde zijn, nadat ze de meest efficiënte zwembeweging voor een bepaalde krachtproductie hebben geleerd.
De praktijk
Een autonome robot is autonoom totdat dit niet meer het geval is wegens een of andere vorm van schade of storing. Door robotmechanismen de mogelijkheid te geven om zich via machine learning aan te passen aan veranderde mogelijkheden, wordt de reikwijdte van hun autonomie vergroot. Autonome onderwatervaartuigen (AUV's) leveren cruciale informatie over hoe onze oceanen werken. Ze geven aan wat er in de diepzee bestaat en hoe menselijke activiteiten de oceaandynamiek verstoren. Maar ze zijn erg duur om te bouwen en in te zetten. Als het voortstuwingssysteem van een vaartuig faalt in een ontoegankelijk gebied zonder deze aanpassing, wordt het in feite oceaanafval. De bevindingen aan Caltech zouden de waarschijnlijkheid dat een AUV zijn missie succesvol kan voltooien en kan worden geborgen, moeten vergroten.
Aanpassingsvermogen via machine learning kan ook de functie verbeteren van kleine drones die in kleine openingen in complex terrein kunnen navigeren tijdens noodscenario's. Denkt u bijvoorbeeld aan het zoeken naar vastzittende individuen na een aardbeving. Dit type terrein maakt het waarschijnlijker dat de MAV beschadigd raakt tijdens zijn zoektocht. De bevinding aan Caltech zouden drones robuuster kunnen maken voor inzet in uitdagende omgevingen met veel schade.
Verdere ontwikkeling
Hoewel zowel de experimentele robot als levende dieren hun slagmechanica kunnen aanpassen om zich aan te passen aan schade, voeren ze niet dezelfde aanpassingen door. Theoretisch gezien zouden de flappers (of vinnen of vleugels) in alle gevallen zowel de amplitude als de frequentie moeten veranderen om optimale voortstuwing te bereiken na schade.
Maar de meeste studies van vissen met vinschade laten zien dat de dieren de amplitude verhogen. Maar dat gebeurt niet noodzakelijkerwijs met de frequentie van hun slagen om dit te compenseren. De robot daarentegen past beide aan. Dit komt waarschijnlijk door het effect van evolutionaire druk op vissen en insecten die niet relevant zijn voor een toepassing van een robot. Hoe fladderende robots zich het beste aanpassen aan schade, gebeurt niet per se op dezelfde manier als in de natuur.
De wetenschappelijke publicatie vindt u hier.
Foto: screenshot video Caltech