
11/07/2022
Door Ad Spijkers
Het hart van een nieuwe zachte robot van de TU Eindhoven is een 'hysteretisch ventiel', zoals de onderzoekers hun uitvinding noemen.
Een slim ontworpen drukventiel laat zachte robots zonder computerbesturing reageren op hun omgeving. Het onderzoek van Bas Overvelde (hoofddocent faculteit Mechanical Engineering) en Luuk van Laake (promovendus) brengt robots die bewegen en voelen als levende wezens dichterbij. Zulke ontwerpen zijn geschikt voor het verkennen van ruig en onbekend terrein of voor medische toepassingen.
Soft robots
Robots worden voornamelijk geassocieerd met harde machines, aangestuurd door een centrale computer. Levende wezens bewegen soepel doordat er intelligent gedrag zit ingebakken in hun lichaam. Dat zou ook ideaal zijn voor robots die voortdurend omgaan met mensen, zoals in de zorg. Het onderzoeksveld van soft robotics werkt aan robots van zachte, flexibele materialen die zonder aansturing van buitenaf reageren op veranderingen in hun omgeving.
Overvelde, naast zijn aanstelling bij de TU/e ook werkzaam bij AMOLF, wil robots maken zonder centrale computer, die bewegen en reageren op hun omgeving dankzij ingebouwde reflexen in het robotlichaam. Zijn team ontwikkelde een zachte robot die werkt op luchtdruk (zonder elektronica), die loopt én van ritme verandert door te reageren op de omgeving dankzij een slim ontworpen ventiel.
Ketchupfles
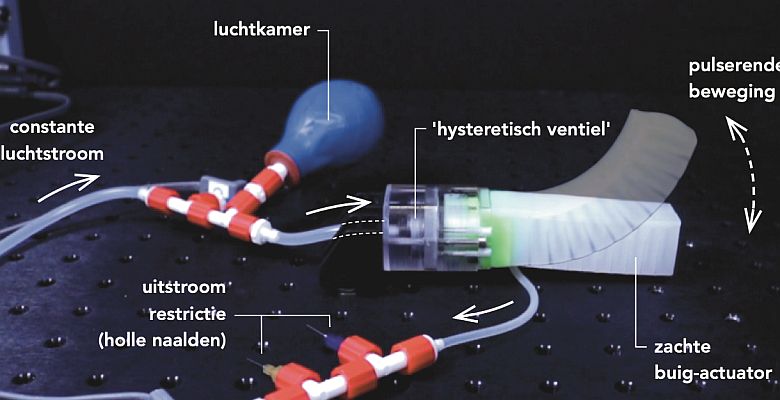
Het hart van de nieuwe zachte robot is een 'hysteretisch ventiel'. Het is te herkennen als een variant op de opening van een ketchupfles. De opening zorgt ervoor dat ketchup gemakkelijk is te doseren en niet lekt. Toch sputtert de ketchup soms als hij ondersteboven wordt gehouden en er hard in wordt geknepen. De opening klappert dan snel open en dicht. Moderne flessen zijn aangepast zodat ze zo min mogelijk sputteren. Maar de Eindhovense onderzoekers vroegen zich af of je met dit normaal gesproken ongewenste gedrag een robot kunt laten bewegen.
In een computermodel ontwierpen ze eerst eigenschappen zoals de stijfheid van de minuscule flapjes in de ventielopening. Daarna werden de ventielen gemaakt door siliconenrubber in een nauwkeurig 3D-geprinte mal te gieten. Met een laser sneden ze daarin kleine inkepingen. Zo ontstaat een ventiel dat normaal dicht is, opeens opengaat als de druk hoog genoeg is, en pas weer sluit als de druk een stuk is gezakt. Aangesloten op een pomp en reservoir ontstaat vanzelf een ritme van druk opbouwen en lucht doorlaten. Op deze manier worden de spieren van de zachte robot afwisselend opgepompt en ontspannen.
Het nieuwe onderdeel lijkt simpel, maar bleek verborgen krachten te hebben. Toen de onderzoekers een computermodel maakten van twee ventielen die waren aangesloten op hetzelfde reservoir, kwamen ze om en om in beweging. Onverwacht, maar het bleek in het echt ook te werken. Aldus konden de onderzoekers een vierpotige robot bouwen met een natuurlijk loopritme, zonder commando's van buitenaf. Ook een zachte grijphand met vijf ritmisch trommelende vingers bleek haalbaar.
Perspectief
Ontwerpers dromen van zachte robots die niet alleen uit zichzelf bewegen, maar ook reageren op hun omgeving. Uiteindelijk willen ze een robot die vanzelf van loopritme verandert als hij een obstakel tegenkomt, puur omdat de spieren en gewrichten reageren op de tegendruk. In het lab lukt dat aardig. Als de onderzoekers kortstondig een luchtslangetje afsluiten door er even in te knijpen, verandert de druk in het robotlichaam. De robot schakelt dan naar een ander loopritme. De zachte robot kan dus reageren op zijn omgeving zonder dat daar een centrale computer aan te pas komt.
Maar voordat de zachte robot aan het zorgbed staat, is er nog een weg te gaan. Maar de vooruitzichten zijn goed, denken de onderzoekers. Met simpele onderdelen is complex gedrag te maken zonder een computer die elke beweging doorrekent. Een zachte robot die beweegt door ingebouwde natuurlijke reflexen scheelt ook energie.
In levende wezens komt veel beweging en gedrag voort uit de bouw van het lichaam en de mechanica van spieren en niet op commando vanuit de hersenen. Een hart balanceert automatisch de druk in de linker- en rechterkamer en de elastische energie tijdens het lopen wordt bij elke stap opgeslagen in pezen. Dat is zeer efficiënt en biedt nog voldoende stof voor verder onderzoek.
De wetenschappelijke publicatie vindt u hier.
Foto: screenshot video