
14/05/2024
Door Ad Spijkers
We willen een robot naar de wereld laten kijken zoals wij dat zelf doen. Maar is dat wel de juiste weg?
Hoe komt de wereld in de robot terecht, of anders gezegd: hoe oriënteren autonome voertuigen zich in hun omgeving? Dit is de vraag waarmee een mediawetenschapsteam van de Ruhr Universität Bochum (RUB) zich bezighoudt. Deze is minder technisch en meer gerelateerd aan welke beslissingen moeten worden genomen. Hierdoor kan de door het systeem gegenereerde data een model van de wereld creëren waarmee het voertuig kan interageren. Deze beslissingen zijn door mensen genomen. Om ze op te sporen, hebben de onderzoekers een zelfrijdend voertuig helemaal opnieuw gebouwd.
Onderliggende beslissingen
De besluitvormingsprocessen in kwestie worden vooral merkbaar als er fouten optreden. In de VS vond bijvoorbeeld een dodelijk ongeval plaats met een zelfrijdende auto, omdat het voertuig een vrouw met een fiets niet correct herkende. Het systeem had waarschijnlijk zowel de persoon als de fiets betrouwbaar kunnen herkennen. Maar het geheel kon niet in combinatie worden geïnterpreteerd.
Onderzoekers in Bochum bestudeerden de standaarden over dit onderwerp gedetailleerd en evalueerde onder meer informatie over veiligheidstests voor autonome oriëntatietechnologie. Er staat bijvoorbeeld in dat dummies bij dergelijke tests geen wapperende kleding mogen dragen. Dergelijke kleding is door de systemen namelijk moeilijk te herkennen. Dergelijke beslissingen hebben implicaties bij slecht zicht voor de sensoren en bijvoorbeeld als clubbezoekers ‘s nachts in precies dit soort kleding naar huis gaan.
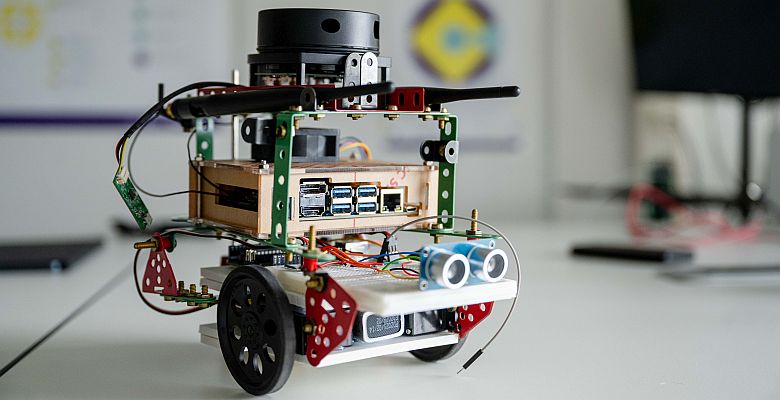
Om de ketens van deze beslissingen in kaart te brengen, maakt het onderzoeksproject ook gebruik van historische documenten uit de ontwikkeling van autonome rijsystemen. De nadruk ligt echter vooral op het zelf ontwerpen van zo’n systeem – bewust zonder de voorkennis die engineers met zich meebrengen. Het volledig opnieuw ontwerpen van het autonome voertuig duurde ongeveer één semester, waarvan drie weken zeer intensief. Voor de onderzoekers was falen onderdeel van het proces.
Techniek
Als sensor kozen ze voor een Lidar-systeem. Dit scant de omgeving met infrarood laserstralen en werkt ook in het donker. Net als radartechnologie is Lidar gebaseerd op het feit dat verschillende materialen licht op verschillende manieren reflecteren. De sensoren kunnen data verkrijgen uit een 360° omgeving omdat de sensor met hoge snelheid om zichzelf heen draait. De door de laser ontvangen lichtpulsen worden vertaald in numerieke waarden.
Het zelfgebouwde voertuig verzendt de gegenereerde data naar een computer. En dan beginnen de beslissingen: moeten bepaalde gegevens als een lijn worden geïnterpreteerd? Of komen ze overeen met een punt? Hoe bepaalt het systeem of een reflecterend object een bewegend object is, bijvoorbeeld een mens, of niet? Het gaat om een sequentie van vertaalstappen die leiden naar een wereldmodel.
Eenmaal gevestigd moeten zelfrijdende auto’s deze beslissingen in real-time in de echte wereld nemen om veilig te kunnen reizen. Om dit te laten werken, wordt kunstmatige intelligentie gebruikt om te doen wat het project onderzoekt als microbeslissingen: talloze beslissingen die in extreem korte tijd worden genomen. Robots hebben geen bewustzijn – de onderzoekers willen weten hoe ze door zulke micro-beslissingen een model van de wereld produceren waarmee de robots kunnen communiceren.
Foto: RUB, Marquard