
29/06/2016
Door Ad Spijkers
Voor hun voertuigbesturing hebben studenten van ROC Mondriaan voor de Vakkanjers-wedstrijden hun mobiele robot voorzien van een BlueTooth module van Phoenix Contact.
De Vakkanjers wedstrijden dagen techniekstudenten uit om zich met elkaar te meten in creativiteit en technische kennis. Coen van der Burg en Bas Kleinjans, tweedejaars niveau 4 van de opleiding Mechatronica aan het ROC Mondriaan, locatie Delft, hebben dit jaar meegedaan in de discipline mobiele robotica. Hun robotvoertuigen kunnen model staan voor verkennings- en reddingsvoertuigen.
Tijdens de eerste wedstrijd moesten de mobiele robots een aantal voorwerpen binnen een soort piramide zoeken en met een camera fotograferen. Voor de tweede wedstrijd, in maart tijdens de TechniShow in de Jaarbeurs, was de opening op een tweede etage aangebracht. De grootste uitdaging voor de deelnemers was, hun voertuig op die bovenverdieping te krijgen. De leerlingen van ROC Mondriaan vonden de oplossing door een transportvoertuig te bouwen en te voorzien van een schaarlift.
WLAN en BlueTooth
Tijdens de eerste wedstrijd bleek dat alle deelnemende teams voor de communicatie gebruik maakten van WLAN. De hoge netwerkbelasting zorgt voor trage reacties en niet of slecht doorgekomen berichten. Voor de grote hoeveelheid data vanaf de camera is WLAN onvermijdelijk, maar voor de voertuigbesturing kozen Coen en Bas voor de tweede wedstrijd voor BlueTooth.
Dit protocol heeft een geringe bandbreedte (3 Mbit/s) in vergelijking met WLAN (100 Mbit/s). Maar waar een WLAN-verbinding vast gebruik maakt van een van drie kanalen binnen de 2,4 GHz band, maakt BlueTooth in diezelfde band gebruik van frequency hopping binnen 72 kanalen. Op advies van docent Toby Jeltes werd gekozen voor de industriële BlueTooth module van Phoenix Contact. Deze beschikt over een krachtige zender en heeft ruim voldoende bereik voor deze toepassing.
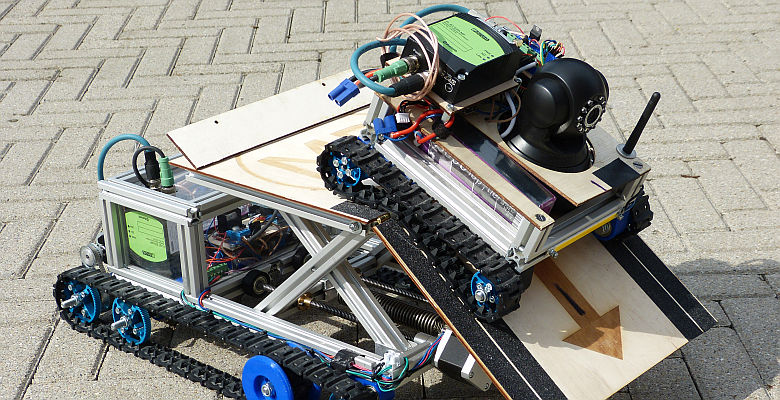
De besturing van de rupsaandrijving en de beweging van de camera wordt verzorgd door een Arduino microcontroller met een ingeprogrammeerde webserver. De controller is via een standaard ethernet-kabel verbonden met de BlueTooth module. De voortbeweging wordt verzorgd door stappenmotoren die een rupsband aandrijven. (foto: Jaap Dijsselhof, Phoenix Contact)