
16/09/2024
Door Ad Spijkers
Een vallei op Mars verkennen, grotten verkennen en zoeken naar leven zijn de doelstellingen van het onderzoeksinitiatief VaMEx.
Over Mars strekt zich een grote vallei uit. De Valles Marineris is 3.000 km lang, 600 km breed en gemiddeld 8 km diep. De Latijnse naam gaat terug naar de Mars-orbiter 'Mariner', die de vallei begin jaren zeventig ontdekte.
Sinds 2012 heeft deze grootste bekende kloof in het zonnestelsel speciale aandacht van het Deutsches Zentrum für Luft- und Raumfahrt (DLR) in Keulen. Het VaMEx-initiatief heeft tot doel sleuteltechnologieën te ontwikkelen voor de verkenning van dit moeilijke terrein met robots in een zwerm. De Valles Marineris Explorer (VaMEx) bestaat uit bewegende, rennende en vliegende drones die een complex totaalsysteem vormen. Bij het project is onder meer de Universität Würzburg betrokken.
Grotten
Doel is om voor het eerst de kloven en grotten van de kloof te verkennen. De zoektocht omvat ook het zoeken naar sporen van vloeibaar water en dus mogelijk leven dat in beschermde niches zou kunnen voorkomen. Om dit te doen wil de DLR een zwerm autonome, onderling verbonden robots naar Mars brengen. Ze zullen op de grond, in de 'buitenlucht' en in grotten opereren en daar beelden en andere gegevens verzamelen.
Er zijn waarschijnlijk een paar grotten in de ruige vallei. Zelfs in het ogenschijnlijk eentonige landschap van de maan ontdekten onderzoekers uit Italië en de VS onlangs de ingang van een grote grot. Grotten zijn niet alleen interessant als locatie voor maan- of Marsbases; ze bieden bescherming tegen kosmische straling. Grotten hebben gematigdere temperaturen en bieden daarmee een goede omgeving voor het behoud van leven dat miljarden jaren geleden had kunnen ontstaan, toen de omstandigheden op Mars veel gunstiger waren.
Robotzwerm
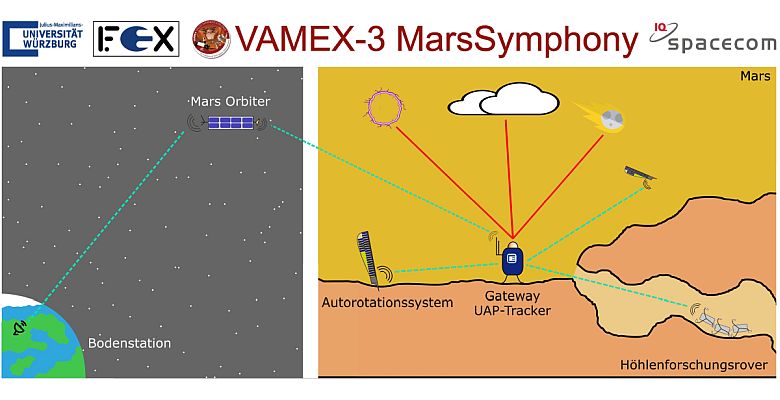
De onderzoekers in Würzburg hebben hun deelproject de naam 'VaMEx3-MarsSymphony' gegeven. Het gaat er om de afzonderlijke elementen van de robotzwerm harmonieus samen te laten spelen als een orkest. In de huidige ontwikkelingsfase omvat de zwerm mobiele robots in de lucht en op het land, een stationaire gateway op de grond die dient als commandocentrum voor communicatie en een satellietsimulator voor het uitwisselen van gegevens met de aarde.
Wanneer de robots grotten binnengaan, worden ze afgeschermd van het oppervlak van Mars en kunnen ze niet rechtstreeks met de gateway communiceren. Het concept omvat daarom ook repeaterstations die de opgenomen beelden en gegevens doorgeven in een transportketen - van de robot in de grot tot de poort op het aardoppervlak.
Ook een deel van de zwerm zijn zogenaamde autorotatielichamen. Ze worden uit de lucht gedropt en verzamelen gegevens terwijl ze zachtjes naar de grond glijden. Dat laatste bereiken ze dankzij hun bijzondere ontwerp: de langwerpige lichamen zijn gebouwd als esdoornzaadjes. Ze hebben één vleugel en draaien om hun eigen as, waardoor ze zachtjes naar beneden draaien. Hun vliegpad kan worden gecontroleerd, zodat ze specifiek over een groter gebied kunnen worden verspreid en vervolgens kunnen worden gebruikt als sensor-, repeater- en navigatienetwerken.
Camera naar de hemel
Het robotorkest op Mars heeft als bijzonderheid dat de stationaire gateway zal worden uitgerust met een camera die de hemel van Mars in de gaten houdt. Alle eerdere Mars-missies waren gericht op het oppervlak van de planeet, terwijl DLR naar boven wil kijken. Daar zou veel te zien moeten zijn: wolkenvorming, meteoren of bliksem en andere lichtgevende verschijnselen.
Een internationaal onderzoeksteam concludeerde uit seismische gegevens in juni 2024 dat meteorieten ter grootte van een basketbal bijna dagelijks Mars lijken te treffen. Dit zou zijn te bevestigen met gegevens uit de camera die het binnendringen van meteorieten filmen en deze gebeurtenissen kunnen correleren met de seismische signalen.
De camera kan kunstmatige intelligentie gebruiken om specifiek onbekende hemelse verschijnselen te detecteren, zoals waargenomen op aarde. De integratie van een camerasysteem voor hemelobservatie op de gateway is een belangrijke ontwikkelingsstap in de richting van een detectiesysteem voor korte termijn verschijnselen in de atmosfeer van Mars. De nieuwe camera zou in de toekomst ook niet-geïdentificeerde anomale fenomenen (UAP's) op Mars kunnen detecteren.
Communicatie
Communicatie tussen de elementen op Mars en het ruimtelijke segment is een uitdaging bij het doorgeven van verkregen data. Gezien de schaarse middelen geldt dit vooral voor de communicatie tussen de gateway op het oppervlak van Mars en de relaissatellieten in een baan om de aarde.
Huidige Marslanders gebruiken de S- of X-band (respectievelijk 2-4 GHz en 7-11,2 GHz). Om de datasnelheid van het transmissiekanaal te vergroten, is het overstappen van de X-band naar de Ka-band (26,5–40 GHz) een cruciale stap. Projectpartner IQ Technologies for Earth and Space in Berlijn zal een voor Ka-band geschikte transceiver ontwikkelen voor gebruik op landers en kleine interplanetaire satellieten, op basis van zijn in de vlucht geteste XLink-systeem. Naast zender-ontvanger-hardware voor interplanetaire systemen heeft het project ook tot doel aangepaste en flexibele transmissieprotocollen te ontwikkelen.
Systeemtest in 2025
Of de robotzwerm werkt zoals gepland zal in de loop van 2025 worden getest in een zogenaamde analoge missie. De betrokkenen zullen de Mars-missie op aarde simuleren, waarschijnlijk in een steengroeve in Duitsland. Ook de camera uit Würzburg speelt een rol in deze simulatie: de video-opnamen van de lucht leveren voldoende grote datavolumes op om de veerkracht van het communicatiesysteem te testen.
Als de analoge missie goed verloopt, zou in een mogelijk vervolgproject de hardware aangepast moeten worden voor gebruik op Mars. De omstandigheden daar zijn bar; de atmosfeer is ijl, de gemiddelde temperatuur is -63°C en grote stofstormen razen regelmatig over de rode planeet.
Foto: Clemens Riegler / Universität Würzburg