
06/04/2023
Door Ad Spijkers
De robotgrijper met drie vingers kan met grote gevoeligheid 'voelen' over de volledige lengte van elke vinger, niet alleen aan de toppen.
Veel robothanden hebben sensoren in de vingertoppen. Een object moet volledig in contact zijn met die vingertoppen om te worden geïdentificeerd. Andere ontwerpen maken gebruik van sensoren met een lagere resolutie die over de hele vinger zijn verspreid, maar deze leggen niet zoveel details vast. In beide gevallen zijn vaak meerdere herhalingen nodig.
Geïnspireerd door de menselijke vinger hebben onderzoekers aan het Massachusetts Institie of Technology (MIT) een robothand ontwikkeld die aanraakdetectie met hoge resolutie gebruikt om een object nauwkeurig te identificeren nadat het slechts één keer is vastgepakt. Ze hebben een robotvinger met een stijf skelet omhuld door een zachte buitenlaag met meerdere hoge-resolutiesensoren onder de transparante 'huid'.
De sensoren gebruiken een camera en LED's om visuele informatie over de vorm van een object te verzamelen, wat zorgt voor continue waarneming over de gehele lengte van de vinger. Elke vinger legt tegelijkertijd data over veel delen van een object vast.
Drie vingers
Met dit ontwerp bouwden de onderzoekers een drievingerige robothand die objecten kon identificeren na slechts één greep, met een nauwkeurigheid van ongeveer 85%. Het stijve skelet maakt de vingers sterk genoeg om een zwaar voorwerp op te pakken, De zachte huid kan een buigzaam voorwerp vastpakken zonder het samen te drukken. De zachte, stijve vingers kunnen vooral handig zijn in een thuiszorgrobot die is ontworpen om te communiceren met een oudere persoon. De robot kan een zwaar item van een plank tillen met dezelfde hand die hij gebruikt om de persoon te helpen een bad te nemen.
Zowel zachte als stijve elementen zijn belangrijk in elke hand, maar dat geldt ook voor het kunnen uitvoeren van geweldige waarnemingen over een heel groot gebied. Dat geldt vooral als we willen overwegen om gecompliceerde manipulatietaken uit te voeren, zoals onze eigen handen kunnen doen. Het doel van het onderzoek was om alle dingen die menselijke handen zo goed maken, te combineren in een robotvinger die taken kan uitvoeren die andere robotvingers momenteel niet kunnen doen.
Opbouw
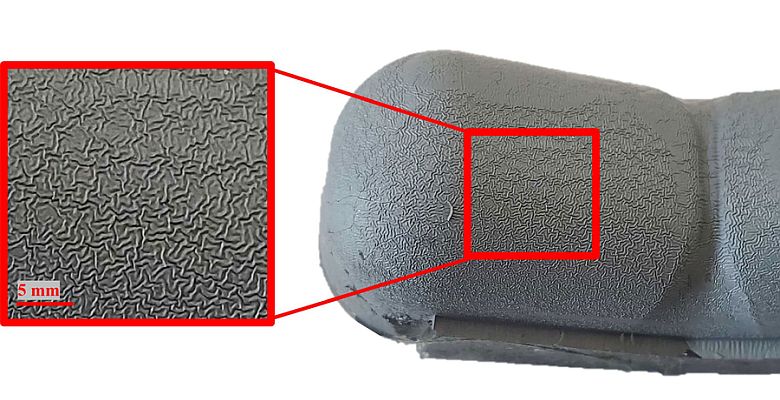
De robotvinger bestaat uit een stijf, 3D-geprint endoskelet dat in een vorm wordt geplaatst en wordt omhuld door een transparante siliconen 'huid'. Door de vinger in een mal te maken, zijn geen bevestigingsmiddelen of lijm meer nodig om de siliconen op hun plaats te houden. De mal heeft een gebogen vorm, zodat de robotvingers in rust licht gebogen zijn, net als menselijke vingers.
Het endoskelet van elke vinger bevat een paar aanraaksensoren (GelSight-sensoren), ingebed in de bovenste en middelste secties onder de transparante huid. De sensoren zijn zo geplaatst dat het bereik van de camera's elkaar enigszins overlapt, waardoor de vinger continu over de gehele lengte waarneemt. De GelSight-sensor bestaat uit een camera en drie gekleurde LED's. Wanneer de vinger een voorwerp vastpakt, legt de camera beelden vast terwijl de LED's de huid van binnenuit verlichten.
Met behulp van de verlichte contouren die in de zachte huid verschijnen, voert een algoritme achterwaartse berekeningen uit om de contouren op het oppervlak van het vastgegrepen object in kaart te brengen. De onderzoekers hebben een machine learning model getraind om objecten te identificeren met behulp van onbewerkte camerabeeldgegevens.
Voortgang
Terwijl ze het fabricageproces van de vinger verfijnden, kwamen de onderzoekers verschillende obstakels tegen. Zo hebben siliconen de neiging om na verloop van tijd van oppervlakken af te schilferen. De onderzoekers ontdekten dat ze dit konden beperken door kleine rondingen toe te voegen langs de scharnieren tussen de gewrichten in het endoskelet. Wanneer de vinger buigt, wordt de buiging van de siliconen verdeeld over de kleine rondingen, wat stress vermindert en afbladderen voorkomt. Ze voegden ook plooien toe aan de gewrichten, zodat de siliconen niet zo veel worden geplet als de vinger buigt.
Nadat ze het ontwerp hadden geperfectioneerd, bouwden de onderzoekers een robothand met twee vingers die in een Y-patroon waren gerangschikt met een derde vinger als tegengestelde duim. De hand legt zes afbeeldingen vast wanneer hij een object grijpt (twee van elke vinger) en stuurt die afbeeldingen naar een machine learning algoritme dat ze gebruikt als invoer om het object te identificeren. Omdat de hand tactiele detectie heeft die al zijn vingers bedekt, kan hij met één greep rijke tactiele data verzamelen.
In de toekomst willen de onderzoekers de hardware verbeteren om de slijtage in de siliconen na verloop van tijd te verminderen. Ook willen ze meer bediening aan de duim toevoegen, zodat deze een grotere verscheidenheid aan taken kan uitvoeren.
Foto: MIT