
19/08/2021
Door Ad Spijkers
Beslissingen die eekhoorns voor en tijdens een sprong nemen, helpen wetenschappers wendbare robots te ontwikkelen.
Onderzoekers van de University of California, Berkeley bestudeerden hoe eekhoorns beslissen om al dan niet een sprong te wagen. Ook onderzochten ze hoe de dieren hun biomechanische vaardigheden beoordelen om te weten of ze veilig kunnen landen.
Begrip van deze mechanismen kan wetenschappers helpen bij het ontwerpen van autonome robots. Deze zouden behendig door gevarieerde landschappen moeten kunnen bewegen om te helpen bij militaire missies, om het puin van een ingestort gebouw te doorzoeken bij zoek- en reddingsacties of om snel toegang te krijgen tot een bedreiging voor het milieu .
Eekhoorns op de campus
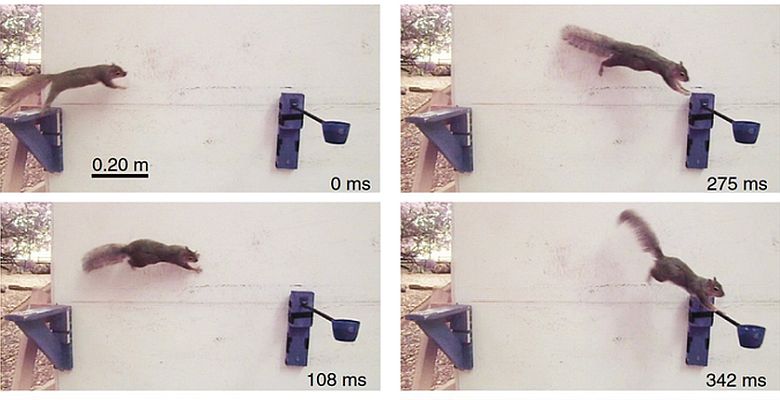
De onderzoekers ontwikkelden nauwkeurige methoden om het gedrag van wilde eekhoorns op de campus te bestuderen. De mensen kwantificeerden hoe de dieren leren om van verschillende soorten 'lanceerplatforms' te springen - sommige buigzaam, andere niet. Dat lukt de dieren in slechts een paar pogingen. Ook onderzochten ze hoe eekhoorns hun lichaamsoriëntatie in de lucht veranderen op basis van de kwaliteit van hun lancering. Tot slot bekeken de onderzoekers hoe de dieren hun landingsmanoeuvres real-time veranderen, afhankelijk van de stabiliteit van de uiteindelijke landingsplaats.
De onderzoekers voerden de experimenten uit in een eucalyptusbos op de campus van UCB. Het Berkeley-team verleidde vosseneekhoorns die over de campus zwerven tot situaties waarin ze moesten beslissen of ze naar een pinda moesten springen of hem moesten laten liggen. Hoe fragieler of bugzamer de tak was waaruit eekhoorns moeten springen, des te hoe voorzichtiger waren ze. Maar het kostte eekhoorns slechts een paar pogingen om zich aan te passen aan verschillende situaties.
Springstrategie
Als ze over een gat springen, beslissen ze vanaf welk punt ze moeten springen. Ze maken een afweging tussen de flexibiliteit van die basis en de te overbruggen afstand. Wanneer ze een tak tegenkomen met nieuwe mechanische eigenschappen, leren ze hun lanceermechanisme in slechts een paar sprongen aan te passen. Deze flexibiliteit is belangrijk om nauwkeurig een afsand te overbruggen en op he gewenste eindpunt te landen.
De buigzaamheid van het vertrekpunt is voor de eekhoorns zes keer kritischer dan de afstand. Mogelijk weten ze dat hun scherpe klauwen hen zullen redden als ze zich misrekenen. Geen van de eekhoorns is tijdens het onderzoek gevallen, ondanks te korte of te lange sprongen. Als ze missen, zwaaien ze onder de landingsplaats door of er overheen, maar ze vallen niet.
Bij te veel of te weinig snelheid kennen ze verschillende landingsmanoeuvres om te compenseren. De combinatie van adaptief planningsgedrag, lerende controle en reactieve stabiliserende manoeuvres helpt hen om snel door de takken te bewegen zonder te vallen. Verrassend was dat eekhoorns tijdens lastige sprongen vaak hun lichaam heroriënteren om van een verticaal oppervlak af te duwen en om hun snelheid aan te passen om een betere landing te verzekeren.
Naar robotica
Door van eekhoorns te leren over de beperkingen van improvisatie met een bepaalde controllerarchitectuur en compatibele actuatoren, zullen ingenieurs begrijpen hoe ze een robotcontroller en actuatoren kunnen ontwerpen om de improvisatiemogelijkheden te maximaliseren. Om tot die volgende stap voor meer wendbare robots te komen, moeten we eerst de ideeën van aanpassing en improvisatie, die dit onderzoek oplevert, observeren en kwantificeren.
Foto: University of California, Berkeley