
28/11/2024
Door Ad Spijkers
Duitse onderzoekers creëren een conceptueel raamwerk voor dronezwermen voor specifieke missies.
Onbemande luchtvaartuigen (UAV), ook bekend als drones, worden door hun brede scala aan toepassingen steeds populairder. Als ze zijn voorzien van sensoren en communicatieapparatuur kunnen drones een multi-UAV-systeem (zwerm) vormen. Wetenschappers van het Helmholtz-Zentrum Dresden-Rossendorf (HZDR) hebben tests uitgevoerd om een conceptueel raamwerk te creëren voor een autonome zwerm met een specifieke missie. De zwerm moet met name onregelmatig gestructureerde omgevingen efficiënt kunnen scannen.
Intelligente zwerm
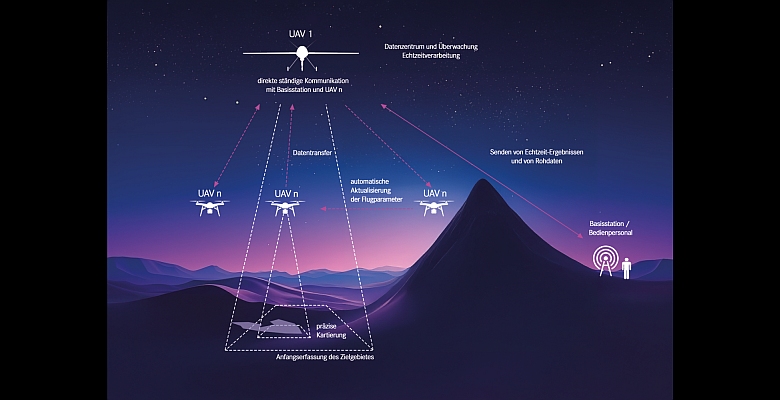
Een slimme zwerm is een vloot van autonome drones die volgens een specifieke set regels samenwerkt om zonder menselijke tussenkomst efficiënt een complexe missie uit te voeren. Door meerdere drones in hiërarchische groepen te laten samenwerken, kunnen de beperkingen van individuele luchtvaartuigen worden overwonnen, waardoor veel gedistribueerde taken in één keer kunnen worden uitgevoerd. Het voorgestelde conceptuele raamwerk is gebaseerd op het leider-volgers-paradigma, waarbij de leidende drone de taken verdeelt over de andere drones (volgers).
Het onderzoek heeft tot doel de gedeelde economische welvaart, sociale ontwikkeling en milieubescherming te verbeteren. Dat kan bijvoorbeeld door natuurlijke gevaren te beperken, het aardoppervlak in kaart te brengen om nieuwe hulpbronnen te ontwikkelen of het milieu te bewaken.
Modellen en tests
De onderzoekers hebben verschillende obstakels gemodelleerd die kunnen ontstaan tijdens een zwermmissie in een onregelmatig gestructureerde omgeving. Hieronder verstaan ze een omgeving waarin informatierijke, complexe gebieden worden afgewisseld met informatiearme gebieden. Vergeleken met de huidige zwermconfiguraties is het voorgestelde systeem veerkrachtiger omdat het snel kan herstellen van systeemfouten.
De onderzoekers hebben de tests uitgevoerd, rekening houdend met de huidige stand van de techniek in zowel virtuele als echte dronezwermen. Ze bewezen dat hun systeem betrouwbaar is en consistent goed presteert. De aanpak bevestigt bijvoorbeeld goede prestaties op het gebied van energieverbruik voor het scenario van grote, onregelmatig gestructureerde gebieden.
Er zijn belangrijke punten waarmee wetenschappers rekening moeten houden bij het ontwerpen van een autonoom multidronesysteem voor hun onderzoeksmissie. Aspecten als bevelslijnen en consensusvorming tussen de drones, de communicatie tussen de leider en de volgers, en de verdeling van de resulterende berekeningen onder de drones zijn van belang. Ze werken aan de hand van een specifieke voorbeeldopstelling die vooral geschikt is voor het voltooien van missies in een onregelmatig gestructureerde omgeving.
Uitdagingen
Momenteel werken de onderzoekers aan een open source softwareframework voor een robotbesturingssysteem dat specifiek geschikt is voor zulke zwermmissies. De toegevoegde waarde van een dergelijk raamwerk is dat het een aantal krachtige functies bevat die relevant zijn voor de uitvoering van autonome missies in bijzonder uitdagende omgevingen.
Het vermogen van drones om ontoegankelijke gebieden te bereiken is een belangrijk voordeel voor verkenningsmissies. Omdat een dronezwerm eenvoudig in omvang kan worden aangepast en in korte tijd een groot gebied kan bestrijken, zijn zwermen geschikt voor verkennings- en surveillancemissies. De beelden van de zwerm kunnen in real-time als 3D-visualisatie worden verzonden (zie illustratie). Hierdoor kunnen gebruikers een realistische kaart van het gebied maken.
Maar er zijn ook uitdagingen. De meest voorkomende problemen die moeten worden overwonnen zijn het vermijden van botsingen en het detecteren van obstakels. Ook het energieverbruik en de levensduur van de batterij vormen hindernissen. Verder zijn er wettelijke vereisten voor het gebruik van drones die van land tot land verschillen.
Hiërarchie
Het principe van zwermen is gebaseerd op een reeks algoritmen waarmee elke zwermeenheid kan communiceren en taken kan delegeren. Ook kan elke eenheid trajecten plannen en vluchten coördineren om de algemene doelen van de zwerm efficiënt te bereiken.
De dronezwermen zijn ontworpen als volledig gedistribueerde systemen waarin elke drone zijn eigen omgeving analyseert. Daarbij werkt hij samen met andere drones om individuele acties uit te voeren die gezamenlijk bijdragen aan het bereiken van het algemene doel van de zwerm. Deze algoritmen werken over het algemeen in een sterk hiërarchische architectuur die de zwerm enige autonomie op verschillende niveaus geeft. Dit betekent dat de persoon die de zwerm bestuurt alleen verantwoordelijk is voor de basisbewaking en het ingrijpen bij een incident.
De wetenschappelijke publicatie vindt u hier.
Ill.: HZDR/Casus