
18/04/2023
Door Ad Spijkers
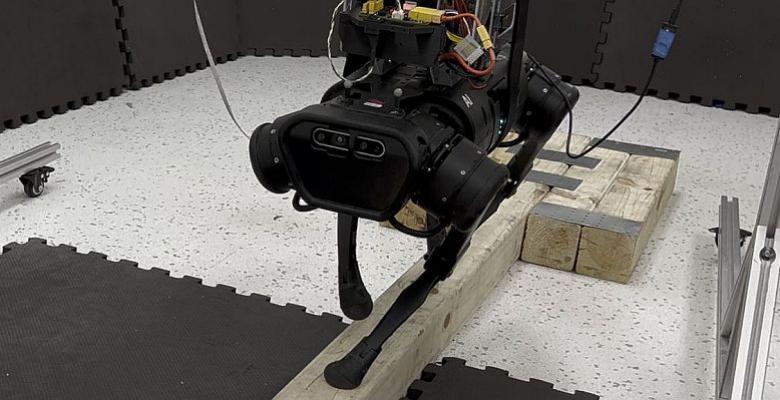
Amerikaanse onderzoekers ontwierpen een vierpotig robotsysteem dat op een evenwichtsbalk kan lopen.
Onderzoekers van Carnegie Mellon University in Pittsburgh hebben een systeem ontworpen dat een viervoetige robot behendig genoeg maakt om over een smalle evenwichtsbalk te lopen. Door gebruik te maken van hardware die vaak wordt gebruikt om satellieten in de ruimte te besturen, compenseerden ze de bestaande beperkingen in het ontwerp van de viervoeter om de balanceermogelijkheden te verbeteren.
Voet aan de grond
De standaardelementen van de meeste moderne viervoetige robots zijn een romp en vier poten. Deze eindigen in een afgeronde voet, waardoor de robot eenvoudige, vlakke oppervlakken kan doorkruisen en zelfs trappen kan beklimmen. Hun ontwerp lijkt op een dier met vier poten, maar deze viervoeters hebben niet zo'n instinctieve behendigheid. Dit is in tegenstelling tot cheeta's die hun staart kunnen gebruiken om scherpe bochten te beheersen of vallende katten die hun oriëntatie in de lucht aanpassen met behulp van hun flexibele ruggengraat.
Zolang drie van de voeten van de robot in contact blijven met de grond, kan hij voorkomen dat hij omvalt. Maar als er maar één of twee voeten op de grond staan, kan de gangbare viervoetige robot niet gemakkelijk storingen corrigeren en loopt hij een veel groter risico om te vallen. Dit gebrek aan evenwicht maakt het lopen over ruw terrein moeilijk. Met de huidige besturingsmethoden zijn het lichaam en de benen van een viervoetige robot ontkoppeld en praten ze niet met elkaar om hun bewegingen te coördineren. De vraag is dus hoe hun evenwicht te verbeteren.
RWA
De oplossing van de onderzoekers maakt gebruik van een RWA-systeem (Reaction Wheel Actuator) dat op de achterkant van een viervoetige robot wordt gemonteerd. Met behulp van een nieuwe besturingstechniek kan de robot onafhankelijk van de stand van zijn voeten balanceren. Dergelijke actuators worden veel gebruikt in de lucht- en ruimtevaartindustrie om de stand op satellieten te beheersen door het impulsmoment van het ruimtevaartuig te manipuleren.
Het is in wezen een vliegwiel met een motor eraan vast. Als zware vliegwiel de ene kant op draait, gaat de satelliet de andere kant op draaien. Dit principe is nu toegepast op het lichaam van een viervoetige robot.
Het team maakte een prototype door twee RWA's op een commerciële Unitree A1 robot te monteren: één op de pitch-as en één op de rol-as. Hiermee krijgen ze controle over het impulsmoment van de robot. Met de actuators maakt het niet uit of de benen van de robot in contact zijn met de grond of niet, omdat ze onafhankelijke controle bieden over de oriëntatie van het lichaam.
Testen
Het bleek gemakkelijk om een bestaand besturingskader aan te passen om rekening te houden met de RWA's. Door de hardware verandert de massaverdeling van de robot niet en hij heeft ook niet de beperkingen van een staart of ruggengraat. De hardware kan worden gemodelleerd als een gyrostaat (een geïdealiseerd model van een ruimtevaartuig) en worden geïntegreerd in een standaard modelvoorspellend besturingsalgoritme.
De onderzoekers toonden met een reeks succesvolle experimenten het verbeterde vermogen van de robot om te herstellen van plotselinge schokken aan. In simulaties bootsten ze het klassieke probleem van de vallende kat na door de robot vanaf bijna een halve meter ondersteboven te laten vallen, RWA's de robot zichzelf dankzij de RWA's in de lucht kon heroriënteren en op zijn voeten landen. Ook toonden ze het vermogen van de robot om te herstellen van verstoringen – en het evenwichtsvermogen van het systeem – met een experiment waarbij de robot over een evenwichtsbalk van 6 cm breed liep.
Voortgang
De onderzoekers voorzien dat viervoetige robots zullen overgaan van onderzoeksplatforms in laboratoria naar algemeen beschikbare producten voor commercieel gebruik, vergelijkbaar met waar drones ongeveer tien jaar geleden waren. En voortdurend wordt nog gewerkt om de stabiliserende capaciteiten van een viervoetige robot te verbeteren. Ze passen dan nog beter bij de instinctieve vierpotige dieren die hun ontwerp inspireerden, zouden ze in de toekomst kunnen worden gebruikt in scenario's met hoge inzetten, zoals zoeken en redden. De onderzoekers denken dat u ze de komende jaren nog veel meer 'in het wild' zult zien.
De wetenschappelijke publicatie vindt u hier.
Foto: Carnegie Mellon University