
07/10/2024
Door Ad Spijkers
Een onderzoek aan de EPFL creëerde een model dat diepgaande inzichten biedt in handbewegingen.
In de neurowetenschap en biomedische techniek is het nauwkeurig modelleren van de complexe bewegingen van de menselijke hand al lang een grote uitdaging. Huidige modellen hebben vaak moeite om de ingewikkelde wisselwerking tussen de motorische commando's van de hersenen en de fysieke acties van spieren en pezen vast te leggen. Deze kloof belemmert niet alleen de wetenschappelijke vooruitgang, maar beperkt ook de ontwikkeling van effectieve neuroprotheses die gericht zijn op het herstellen van de handfunctie voor mensen met ledemaatverlies of verlamming. Het is een essentiële stap is voor de ontwikkeling van neuroprotheses en revalidatietechnologieën.
AI en biomechanica
Onderzoekers aan de École Polytechnique Fédérale de Lausanne (EPFL) hebben een AI-gestuurde aanpak ontwikkeld die het begrip van deze complexe motorische functies aanzienlijk vergroot. Het team gebruikte een creatieve machine learning-strategie die curriculum-gebaseerde reinforcement learning combineerde met gedetailleerde biomechanische simulaties.
Het resultaat is een gedetailleerd, dynamisch en anatomisch nauwkeurig model van handbewegingen dat direct is geïnspireerd op de manier waarop mensen ingewikkelde motorische vaardigheden leren. In dit onderzoek doken de wetenschappers diep in de kernprincipes van menselijke motorische controle. Ze bouwen niet alleen modellen maar ontdekken de fundamentele mechanica van hoe de hersenen en spieren samenwerken.
Uitdaging
De NeurIPS uitdaging van 2023 motiveerde het EPFL-team om een nieuwe benadering te vinden voor een techniek in AI die bekendstaat als reinforcement learning. De Conference and Workshop on Neural Information Processing Systems is een conferentie over machine learning en computationele neurowetenschappen die elke december wordt gehouden, dit jaar op 10 december in Vancouver.
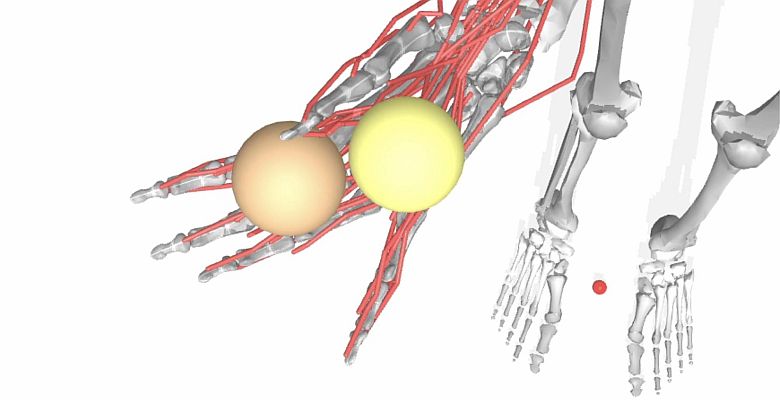
De taak was om een AI te bouwen die twee meridiaankogels (Baoding-ballen), elk bestuurd door 39 spieren, op een gecoördineerde manier nauwkeurig manipuleert. Deze ogenschijnlijk eenvoudige taak is buitengewoon moeilijk om virtueel te repliceren, gezien de complexe dynamiek van handbewegingen, inclusief spiersynchronisatie en evenwichtsbehoud. Het AI-model behaalde een succespercentage van 100% in de eerste fase van de competitie, waarmee ze de concurrentie overtroffen. Zelfs in de meer uitdagende tweede fase toonde hun model zijn kracht in steeds moeilijkere situaties en behield het een overtuigende voorsprong om de competitie te winnen.
Taken opsplitsen
Om te winnen, haalden de onderzoekers in Lausanne inspiratie uit de manier waarop mensen geavanceerde vaardigheden leren. In de sportwetenschap staat dit proces bekend als 'part to whole' training. Deze benadering inspireerde de curriculum-leermethode die in het AI-model werd gebruikt. De complexe taak van het besturen van handbewegingen werd opgesplitst in kleinere, beheersbare delen.
Om de beperkingen van huidige machine learning modellen te overwinnen, pasten ze een methode toe die curriculum learning wordt genoemd. Na 32 fasen en bijna 400 uur training hebben ze met succes een neuraal netwerk getraind om een realistisch model van de menselijke hand nauwkeurig te besturen.
Een belangrijke reden voor het succes van het model is het vermogen om basis, herhaalbare bewegingspatronen te herkennen en te gebruiken. Deze benadering van het leren van gedrag zou de neurowetenschap kunnen informeren over de rol van de hersenen bij het bepalen hoe motorische basispatronen worden geleerd om nieuwe taken onder de knie te krijgen. Deze ingewikkelde wisselwerking tussen de hersenen en spiermanipulatie wijst erop hoe uitdagend het kan zijn om machines en protheses te bouwen die menselijke bewegingen echt nabootsen.
Om een verscheidenheid aan dagelijkse taken uit te voeren, is een grote mate van beweging en een model nodig dat lijkt op een menselijk brein. Zelfs als elke taak kan worden opgedeeld in kleinere delen, heeft elke taak een andere set van deze motorische basisbewegingen nodig om goed te worden uitgevoerd.
Vooruitblik
Het onderzoek is belangrijk voor het begrijpen van het toekomstige potentieel en de huidige beperkingen van zelfs de meest geavanceerde protheses. Wat nu nog ontbreekt, is een dieper begrip van hoe vingerbewegingen en grijpmotorische controle worden bereikt. Dit onderzoeker gaat in deze belangrijke richting. Het is belangrijk om protheses te verbinden met het zenuwstelsel. Dit onderzoek geeft een wetenschappelijke basis die de onderzoeksstrategie versterkt.
De wetenschappelijke publicatie vindt u hier.
Ill.: EPFL