
12/10/2022
Door Ad Spijkers
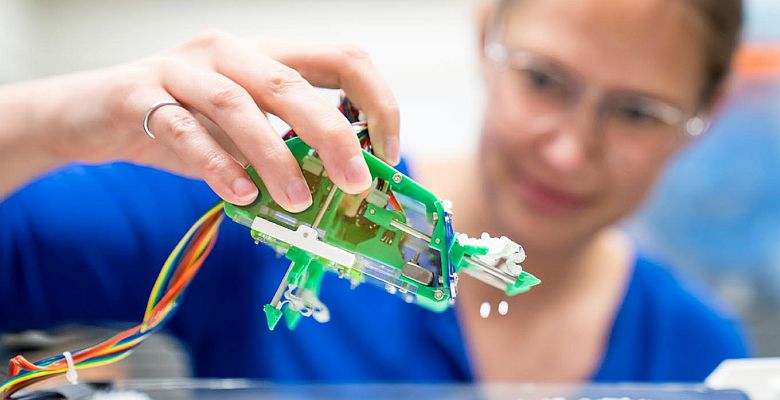
De gravende molkrab-robot is een technisch hoogstandje, geïnspireerd door de natuur, met toepassingen in de echte wereld.
Embur, de gravende robot, is gemodelleerd naar de bescheiden Pacifische molkrab, Emerita analoga. Onderzoekers van de University of California Berkeley lieten zich voor de robot inspireren door het gravende schaaldier. De robot kan op een dag kan helpen de bodem van landbouwpercelen te evalueren, maritieme gegevens te verzamelen en de bodem- en rotsomstandigheden op bouwplaatsen te bestuderen.
De wetenschappers ontwikkelden een robot met poten die zichzelf verticaal kan ingraven. Deze graafrobot, Embur (EMerita BURrowing Robot) genaamd, gebruikt een nieuw ontwerp van de poten om een neerwaartse beweging te bereiken. Deze lijkt op de manier waarop Pacifische molkrabben zich in strandzand begraven.
Uitdagingen
Molkrabben graven gemakkelijk, maar het is moeilijk om naar beneden te bewegen door korrelige media zoals zand en aarde. Hoe dieper een dier graaft, hoe harder de korrels terugduwen, waardoor het graven wordt belemmerd.
Om deze uitdaging te overwinnen en een graafmachine met verticale poten te creëren, ontwierpen de onderzoekers de poten van de robot om een anisotrope krachtrespons te hebben. Dat betekent dat ze veel meer kracht in de ene richting ervaren dan in de andere. Net als bij een zwemmer zetten de zachte stoffen poten van deze robot uit voor grote krachten tijdens de krachtslag, maar vouwen en trekken zich in tijdens de terugslag. Er zijn recente vorderingen gemaakt bij het maken van anisotrope poten voor korrelige media, maar dit is de eerste keer dat ze met succes zijn geïmplementeerd op een vrij gravende robot.
De onderzoekers moesten ook een manier bedenken om te voorkomen dat zandkorrels de mechanismen van de robot binnendringen en blokkeren. Ze wendden zich opnieuw tot de Pacifische molkrab voor inspiratie. Ze hebben een vettig laagje op het oppervlak gemaakt dat deze beschermt tegen uitdrogen, analoog is aan het glijdende membraan dat op de molkrabben wordt aangetroffen. Het is een zacht, flexibel materiaal dat de openingen van kieren bekleedt om te voorkomen dat korrels naar binnen komen, maar toch vrije beweging mogelijk maakt.
Ondergronds
Hoewel robots instellingen als land, ruimte en zee onder de knie hebben, hebben ze ondergronds nog geen significante doorbraak gemaakt. Maar weinig robots kunnen zichzelf onder hun eigen gewicht ingraven zoals Embur.
Robots die ondergrondse omgevingen kunnen verkennen, kunnen worden gebruikt in verschillende industrieën en vakgebieden. Toepassingen zijn onder meer het meten van de bodemkwaliteit van potentiële landbouwlocaties, geotechniek, het verzamelen van mariene gegevens, bouw en graafwerk. Bovendien kunnen ze dienen als kleine inzetbare ankers van zeevoertuigen of ruimterovers, om teamwerk tussen robots mogelijk te maken.
Embur kan ook het wetenschappelijke begrip vergroten van andere gravende dieren, die moeilijk te observeren en ondergronds te bestuderen zijn. Robofysische modellen of robotachtige prototypes zoals Embur kunnen hulpmiddelen zijn om biologen te helpen de biomechanica van deze dieren beter te begrijpen.
Techniek
Om de poten van Embur te ontwerpen, observeerden en analyseerden ze molkrabben in het lab. Ze realiseerden zich al snel dat de vijf pootparen van het dier in twee groepen kunnen worden gesplitst, die in tegengestelde richting van elkaar vegen. Ze merkten ook een patroon van inbrengen, vegen en terugtrekken op, waarbij de laatste de weerstand bij de teruggaande slag leek te verminderen. Vervolgens probeerden ze beide functies te reproduceren in het beenontwerp van de robot.
Vervolgens gebruikten de onderzoekers natuurkundige modellen om de krachten op de benen te schatten, om hen te helpen bij de robotimplementatie. Ze gebruikten een modelleringstechniek die bekend staat als Resistive Force Theory (RFT) om de krachten te modelleren die door de benen worden ervaren tijdens hun ingrijpende banen. Dit heeft geholpen de soorten robotgeometrieën en -gedragingen te begrijpen die het meest succesvolle graven mogelijk maken.
Vooruitzichten
Met Embur toonden de onderzoekers in Berkeley aan, dat graven in droge media met verticale poten onder de juiste omstandigheden mogelijk is. Ze beschouwen dit als een eerste stap in de richting van het creëren van een systeem dat kan ingraven onder een breder scala aan omstandigheden en soorten substraten, zoals op een echt strand.
Ze willen nu het ontwerp verbeteren om dieper te graven. Ook willen ze betere modelleringsmethoden verkennen, zoals Discrete Elementen Methoden (DEM) om het robotgedrag te helpen voorspellen. Uiteindelijk willen ze dat de robot net zoals het dier in echte strandomgevingen kan graven en kan schakelen tussen rennen, zwemmen en graven.
Foto: Adam Lau/Berkeley Engineering