
05/06/2024
Door Ad Spijkers
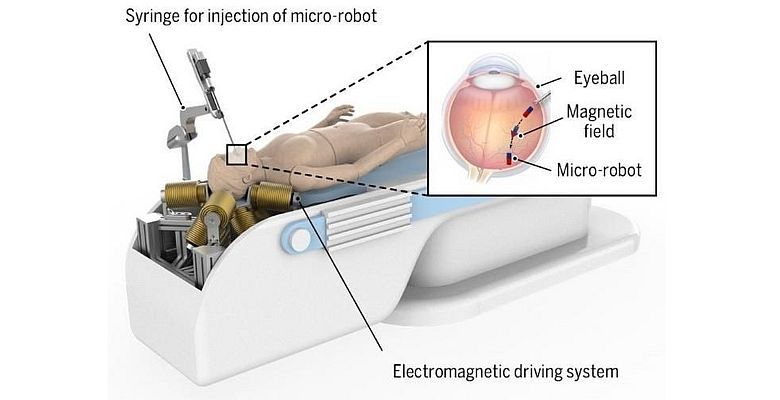
De elektromagnetische aandrijving is ontwikkeld voor een microrobot met vijf vrijheidsgraden voor intraoculaire microchirurgie.
Chinese onderzoekers hebben een elektromagnetisch aandrijfsysteem ontwikkeld dat een microrobot in het achterste deel van het oog van een patiënt manipuleert. De aandrijvingen zijn bedoeld voor flexibele magnetische manipulatie in vijf vrijheidsgraden van een microrobot aan de achterzijde van het oog, waardoor nauwkeurige gerichte medicijnafgifte mogelijk is. Het systeem is ontwikkeld door wetenschappers van de University of Tianjin en de Southern University of Science and Technology in Shenzhen.
Problematiek
Bij intraoculaire microchirurgie is een stap gemaakt van het gebruik van conventionele draagbare chirurgische instrumenten naar de adoptie van door robots ondersteunde chirurgie. De voordelen hiervan het vermogen ervan om fysiologische trillingen van de chirurgen tijdens procedures effectief te demping en een nauwkeurige schaling van de bewegings te bereiken.
Naarmate de nabijheid van het achterste oog echter toeneemt, kunnen door robots ondersteunde apparaten de instrumenten onbedoeld te diep positioneren. Ook kunnen ze excessieve sclerale krachten uitoefenen onder controle van de chirurg, wat het netvlies of de sclera kan traumatiseren en tot bloedingen of zelfs ernstig letsel kan leiden. Dergelijke fouten hebben geleid tot het vóórkomen van intra- en postoperatieve complicaties variërend van 2% tot 30%.
De vijfassige elektromagnetische aandrijfsystemen vormen een duidelijke verbetering vergeleken met de bestaande door robots ondersteunde systemen. Met de nieuwe aandrijving wordt de microrobot een veiliger instrument voor interactie achter het oog. In de krachtgestuurde modus kan het elektromagnetische aandrijfsysteem het risico op het veroorzaken van onherstelbare schade aan het netvlies effectief beperken. Dit gebeurt door grenzen op te leggen aan op elkaar inwerkende krachten, zelfs in situaties waarbij de patiënt beweegt of het systeem faalt.
Uitdagingen
Het is een uitdaging om magnetische velden en magnetische krachten met hoge intensiteit te genereren binnen een grote werkruimte. Daarom is ontwerpoptimalisatie voor het opwekken van een hoog magnetisch veld en een hoge magnetisch krachtopwekking gewenst. Bovendien is studie noodzakelijk van geschikte besturingskaders tegen verstoringen die door vele factoren worden geïntroduceerd. Voorbeelden zijn onnauwkeurige modellering van elektromagnetische spoelen en veranderingen in interactiekrachten in de vloeibare omgeving.
Om de bovengenoemde problemen aan te pakken, is het nieuwe elektromagnetische aandrijfsysteem ontwikkeld. Met optimalisatie van de configuratie en de elektromagneten kan het systeem een nauwkeurige en stabiele manipulatie uitvoeren. Het systeem maakt gebruik van een besturingsframework waarin de ADRC-controller en virtuele begrenzing zijn opgenomen om de robuustheid en veiligheid bij intraoculaire microchirurgie te verbeteren.
Simulatie en analyse
Om de invloeden van het voorgestelde ontwerpoptimalisatie- en besturingskader te evalueren, zijn simulaties en analyses uitgevoerd. In vergelijking met PID- en TDE-controllers duiden de resultaten op een significante afname van zowel de maximale fout als de maximale RMS-fout tijdens tests. Bij de prestatietests is rekening gehouden met verstoringen die bij andere gerelateerde werkzaamheden over het hoofd werden gezien.
De resultaten demonstreren de opmerkelijke robuustheid van het systeem bij aanwezigheid van verstoringen, zoals blijkt uit de maximale fout en de RMS-fout die respectievelijk lager zijn dan 172,2 µm en 35,8 μm.
Foto: School of Mechanical Engineering, Tianjin University