
02/08/2023
Door Ad Spijkers
Het bedrijf heeft nieuwe modules aan het ATRO robotbouwpakket toegevoegd, waarmee de flexibiliteit van het systeem verder wordt vergroot, tot meerarmige robots toe.
Met een combinatie van gestandaardiseerde motormodules met geïntegreerde aandrijffunctionaliteit en linkmodules in verschillende geometrieën kan de gebruiker met ATRO (Automation Technology for Robotics) van Beckhoff flexibel verschillende robotkinematica bouwen. Zo ontstaan robotoplossingen die voor de betreffende toepassing zijn geoptimaliseerd. Dankzij de volledige integratie van de robotbesturing in het TwinCAT-besturingsplatform met zijn uitgebreide automatiseringsfunctionaliteiten kunnen ook complete oplossingen voor een machine eenvoudig worden geïmplementeerd.
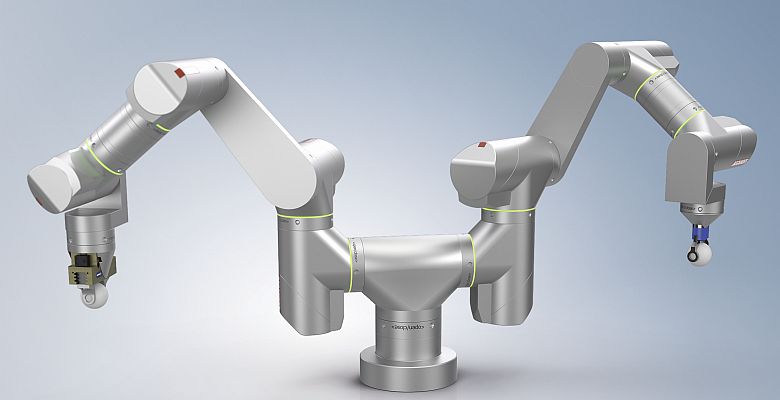
Als mechanisch passieve modules worden ATRO- modules gebruikt om de kinematische structuur of de werkruimte aan te passen aan de respectievelijke vereisten. Nieuw in het programma zijn een T-vormige module met twee takken en L- en S-vormige modules. Een op Automatica 2023 getoonde voorbeeldtoepassing is een tweearmige robotkinematica op basis van de T-module, elk met vier motormodules (= gewrichten) in de armen. De gemeenschappelijke hoofdas zou kunnen worden gebruikt als continu roterende as en dus als bewegende robotbasis.
Eindeloze rotatie
In het ATRO-systeem kunnen alle assen, van de basis tot de eindeffector, eindeloos roteren dankzij de interne mediaroutering. De twee armen worden tegelijkertijd naar verschillende werkgebieden geleid, waar ze werkstukken kunnen grijpen, neerleggen of bewerken. De hele constructie is ruimtebesparend en tegelijkertijd snel en efficiënt. De retourslagen van de robot – die anders gebruikelijk zijn door de asbeperkingen en waarin geen proces wordt verwerkt – zijn niet meer nodig.
De toevoer van grijpers met perslucht of energie wordt via de ATRO-interfaces van de modules intern in de structuur van de basishoofdas naar de twee eindeffectoren geleid. De nieuwe L- en S-vormige modules ondersteunen de kinematica met vier vrijheidsgraden, bijvoorbeeld voor palletiseertaken.
Op Automatica werd ook een bijzondere eigenschap van een van de nieuwe L-vormige linkmodules gedemonstreerd. De assen van deze robotconfiguratie kunnen niet met zichzelf botsen, waardoor de eindeloze rotatie van alle assen optimaal kan worden benut. Bij alle (overige) robotconfiguraties wordt een aanrijding softwarematig voorkomen.
Besturing
Een andere innovatie in het totaalsysteem van Beckhoff is het gebruik van het steekbare en modulaire MX-systeem als robot- en machinebesturing. Een MX-systeemconfiguratie – bestaande uit voeding, industriële pc, digitale in-/uitgang en veiligheidsmodules – maakt het mogelijk om ATRO zonder schakelkast te gebruiken. De vereiste 48 V-voeding en EtherCAT-communicatie wordt aan de robot geleverd via een enkele hybride kabel van de nieuwe MX-systeemvoedingsmodule met een uitgangsstroom van 40 A.
Voor de pneumatische aansturing van de eindeffectoren zijn de nieuwe pneumatische modules in het MX-systeem beschikbaar. Het resultaat is een complete, compacte en kastloze robotbesturingsoplossing die eenvoudig kan worden uitgebreid voor verdere automatiseringstaken binnen een machine of cel.
Foto: Beckhoff