
27/09/2022
Door Ad Spijkers
Onderzoekers creëerden een systeem waarmee robots grijpers effectief kunnen gebruiken met de juiste hoeveelheid kracht.
Het gebruik van gereedschappen is lange tijd een kenmerk geweest van menselijke intelligentie. Het is een praktisch probleem dat moet worden opgelost voor een breed scala aan robottoepassingen. Maar machines zijn nog steeds slecht in het uitoefenen van de juiste hoeveelheid kracht om gereedschappen te bedienen die niet stevig aan hun handen zijn bevestigd.
Om deze tools robuuster te manipuleren, werken onderzoekers van het Computer Science and Artificial Intelligence Laboratory (CSAIL) van het Massachusetts Institute of Technology samen met het Toyota Research Institute (TRI). Laatstgenoemd instituut heeft onder meer in vestiging in Cambridge, vlak bij het MIT. De onderzoekers hebben gezamenlijk een systeem ontworpen dat tools kan grijpen en de juiste hoeveelheid kracht kan uitoefenen voor een bepaalde taak , zoals het opvegen van vloeistof of het uitschrijven van een woord met een pen.
SEED
Het systeem, Series Elastic End Effectors (SEED) maakt gebruik van zachte grijpers en ingebouwde camera's. Deze brengen in kaart hoe de grijpers vervormen over een zesdimensionale ruimte (denk aan het opblazen en leeglopen van een airbag) en kracht uitoefenen op een gereedschap. Met zes vrijheidsgraden kan het object naar links en rechts, omhoog of omlaag en voor- en achteruit worden bewogen, rollen, stampen en gieren.
De besturing in gesloten kringloop – een zelfregulerend systeem dat een gewenste toestand handhaaft zonder menselijke interactie – gebruikt SEED en visueel-tactiele terugkoppeling om de positie van de robotarm aan te passen om de gewenste kracht uit te oefenen. Dit kan bijvoorbeeld handig zijn voor iemand die gereedschap gebruikt wanneer er onzekerheid is in de hoogte van een tafel, omdat een voorgeprogrammeerd traject de tafel volledig kan missen.
De onderzoekers hebben sterk vertrouwd op onderzoek aar een hybride kracht-positie-controller. Het idee is dat je op sommige assen de positie wilt kunnen regelen en op andere de kracht. Met SEED is elke uitvoering die de robot waarneemt, een recent 3D-beeld van de grijpers. Daardoor wordt real-time gevolgd hoe de grijpers rond een object van vorm veranderen. Deze afbeeldingen worden gebruikt om de positie van het gereedschap te reconstrueren en de robot gebruikt een geleerd model om de positie van het gereedschap in kaart te brengen met de gemeten kracht.
Validatie
Het geleerde model is verkregen met behulp van eerdere ervaringen met de robot, waarbij deze een kracht-koppel-sensor verstoort om erachter te komen hoe stijf de grijpers zijn. Als de robot nu de kracht heeft gevoeld, zal hij die vergelijken met de kracht die de gebruiker beveelt. Hij zal dan in een bepaalde richting bewegen om de kracht aan te passen, allemaal in de 6D-ruimte.
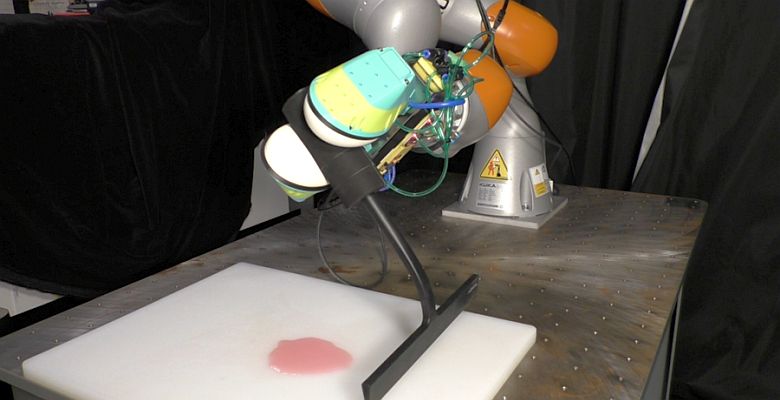
Tijdens de test kreeg SEED de juiste hoeveelheid kracht om wat vloeistof in een vliegtuig op te vegen. De basislijnmethoden hadden moeite om de juiste veegbeweging te krijgen. Toen hem werd gevraagd om met een pen wat op papier te zetten, schreef de bot effectief MIT. De robot was ook in staat om de juiste hoeveelheid kracht uit te oefenen om een schroef aan te drijven.
Momenteel gaat het systeem uit van een specifieke geometrie voor gereedschap. Het moet cilindrisch zijn en er zijn nog steeds veel beperkingen aan hoe het kan generaliseren wanneer het nieuwe vormen ontmoet. Aankomend werk kan inhouden dat het raamwerk wordt gegeneraliseerd naar verschillende vormen, zodat het willekeurige gereedschappen in het wild aankan.
Foto: MIT CSAIL