

30/10/2023
Door Ad Spijkers
Chinese onderzoekers hebben een besturingsmethode ontwikkeld om assemblage en onderhoud in de ruimte te verbeteren.
Assemblage in de ruimte is een cruciaal aspect van werkzaamheden in de ruimte. Hierbij interageert de manipulator frequent en direct met objecten in een complex assemblageproces. De traditionele manipulatorbesturing heeft beperkingen bij het aanpassen aan diverse montagetaken en is kwetsbaar voor trillingen, wat leidt tot mislukte montage.
Om dit probleem aan te pakken, stellen onderzoekers van het Beijing Institute of Technology een mensachtige methode voor variabele toegangscontrole voor, gebaseerd op de variabele dempingseigenschappen van de menselijke arm. Deze methode kan de veiligheid, robuustheid en aanpasbaarheid van de assemblage van robotruimten effectief vergroten.
Onderhoud en assemblage
Voor onderhoud en reparatie in de ruimte worden steeds vaker robots gebruikt vanwege. Dit komt door hun grotere aanpassingsvermogen aan de barre ruimteomgeving in vergelijking met menselijke astronauten. Deze trend is belangrijk voor de ontwikkeling van ruimtetechnologie. Robots kunnen de gezondheidsrisico's voor mensen in ruimtestations verminderen en de uitdagingen van het repareren van ruimtevaartuigen in de ruimte kan aanpakken.
Robotachtige assemblage is een essentieel onderzoeksgebied dat de afgelopen jaren belangrijke vooruitgang heeft geboekt. 'Compliance control' is naar voren gekomen als de belangrijkste methode om robots in staat te stellen complexe assemblagetaken uit te voeren. De nalevingscontrole stelt echter hoge eisen aan de prestaties van de manipulator. Het is een uitdaging om de vereiste niveaus van precisie en aanpassingsvermogen te bereiken.
Onderzoekers hebben verschillende methoden voor besturing voorgesteld, waaronder dempingsbesturing, stijfheidsbesturing, hybride kracht-/positiebesturing en fuzzy adaptieve regelalgoritmen. Deze algoritmen zijn bedoeld om het aanpassingsvermogen en de efficiëntie van robots te verbeteren bij het uitvoeren van assemblagetaken, vooral in onbekende omgevingen.
Data-acquisitie
Bij assemblagetaken gaat het vaak om contact tussen een manipulator en een object dat wordt geassembleerd. Om te voorkomen dat overmatige contactkracht het object beschadigt, is demping noodzakelijk om energie te dissiperen en trillingen te beperken. Maar objecten met een grotere demping verbruiken sneller energie onder invloed van externe krachten. Het bewegingsapparaat van de menselijke arm kan de demping flexibel aanpassen om verschillende taken veilig en stabiel uit te voeren.
Om parameters zoals contactkracht en snelheid te verzamelen, heeft een team van Beijing University of Technolgy een dynamisch data-acquisitieplatform opgezet om de beweging van de menselijke arm vast te leggen. De belangrijkste componenten van het systeem omvatten een subsysteem voor bewegingsregistratie en een subsysteem voor contactkrachtmeting. Er wordt een krachtsensor gebruikt om data over de contactkracht tussen de menselijke hand en assemblagedelen te verzamelen. Data over de eindsnelheids van de menselijke arm worden verkregen met behulp van een mini motion capture systeem.
Analyse en verificatie
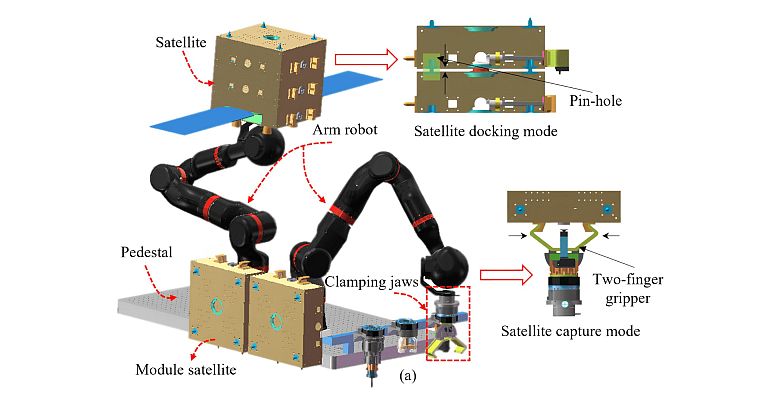
Opdat de robot de assemblagetaak beter kon voltooien, vatten de onderzoekers de dynamische kenmerken van de mens samen. Dit deden ze door de bewegingsdata van de menselijke arm tijdens het assemblageproces te analyseren en deze eigenschap te passen toe op robots. Nu zijn de taken voor de assemblage van satellieten divers en de contactpatronen complex. Daarom analyseerde het onderzoeksteam verschillende scenario's tijdens het satellietassemblageproces en vatte het drie contactpatronen voor de assemblage van satellieten samen. Dit kan ons helpen de contacten voor robotachtige satellietassemblages beter te modelleren en de veilige assemblage van robots nauwkeuriger te besturen.
Met het experiment voerde het team simulatieverificatie van ruimtesatellietassemblage uit via een experimenteel grondplatform. Dit robotplatform kan in de X-, Y- en Z-richting krachten en koppels meten aan het uiteinde van een robotarm. De onderzoekers pasten de mensachtige controller voor variabele parametertoegang toe op het robotexperiment voor satelliet assemblage en verifieerden de effectiviteit van de mensachtige controller voor variabele parametertoegang.
Menselijke besturingsstrategieën kunnen het aanpassingsvermogen, de precisie en de bestuurbaarheid van robots die ruimteassemblage- en onderhoudstaken uitvoeren, verbeteren. Er is echter verder onderzoek nodig om robots in staat te stellen flexibele assemblagetaken uit te voeren die vergelijkbaar zijn met echte mensen. Er zijn ook duurzame en betrouwbare robots nodig die bestand zijn tegen zware ruimteomstandigheden. Vooruitgang in humanoïde controlestrategieën kan belangrijke implicaties hebben voor de toekomst van ruimteverkenning en -ontwikkeling, waardoor de efficiëntie, veiligheid en betrouwbaarheid van missies worden verbeterd.
De wetenschappelijke publicatie vindt u hier.
Ill: Cyborg en Bionic Systems