
21/03/2022
Door Ad Spijkers
Transparante objecten in drie dimensies vastleggen is een uitdaging. Onderzoekers van Fraunhofer-IOT hebben een oplossing ontwikkeld.
Net als vogels en andere dieren (en mensen!) hebben robots moeite met het herkennen van transparante oppervlakken. Ze kunnen glas, glanzende metalen of sterk reflecterende of diepzwarte oppervlakken niet 'zien'. In de industriële omgeving maakt dit het gebruik van robots lastig.
Onderzoekers van FraunhoferIOF hebben een nieuwe 3D-meetmethode ontwikkeld die dit probleem oplost. Met de MWIR 3D-sensor – ook wel Glass360Dgree genoemd – kunnen elementen met reflecterende of lichtabsorberende oppervlakken ruimtelijk worden geregistreerd.
Bij productieprocessen draait het vaak om snelheid in combinatie met hoge kwaliteit. Hoe meer deelprocessen een systeem per minuut kan uitvoeren zonder defecte producten te produceren, des te winstgevender is de productie. De onderzoekers in Jena zagen een kans om Glass360Dgree aan te passen aan verschillende productiescenario's. Ze zijn er in geslaagd om de meetsnelheid te verhogen en de parameters van het meetveld te optimaliseren.
Balans
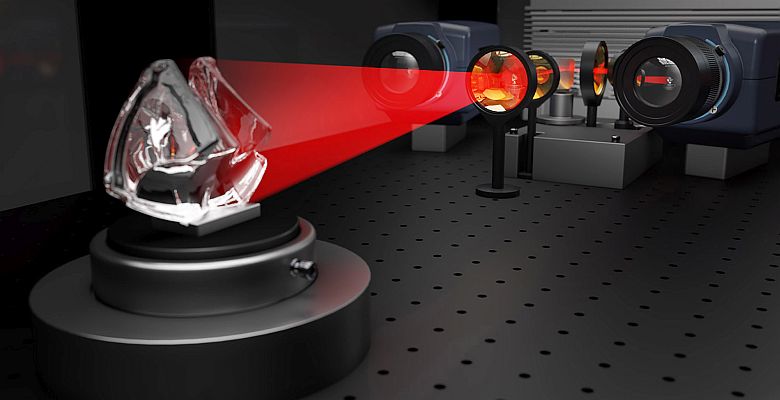
Het systeem combineert infrarood-laserprojectie en thermografie. Nadat het meetobject plaatselijk is verwarmd, bepalen twee warmtebeeldcamera's de resulterende temperatuurverdeling op het oppervlak van het object. In tegenstelling tot conventionele sensoren vereist het nieuw ontwikkelde systeem geen extra meethulpmiddelen of speciale markeringen die tijdelijk op het object worden aangebracht, bijvoorbeeld een tijdelijke verflaag.De onderzoekers hebben drie essentiële uitgangspunten kunnen identificeren om het systeem geschikt te maken voor mogelijk gebruik in een grootschalige industriële productie-installatie.
Het team vond de optimale balans tussen het benodigde detailniveau in de resolutie en de duur van een meting. Daarnaast onderzochten ze verschillende opties voor de optische structuur van hun 3D-sensor om het meetveld variabel aan te passen aan de betreffende taak en de beschikbare ruimte binnen een productie-installatie.
Daarnaast werkt het team samen met onderzoekers van de Technische Universität Ilmenau aan het optimaliseren van de dataverwerking van hun meetsysteem. Het team in Ilmenau kon de actieve besturing van een robot en zijn respectievelijke tools efficiënt afleiden uit de verkregen meetgegevens.
Flexibiliteit
Een hoogenergetische CO2-laser en een beweegbare optische structuur met speciale lenzen projecteren een lijn die in een fractie van een seconde in meerdere stappen over het meetobject beweegt. Tijdens de meting absorbeert het te meten object de energie van het laserlicht en straalt dat zo uit dat het zichtbaar is voor twee gevoelige warmtebeeldcamera's.
Speciaal ontwikkelde software evalueert de opnamen van de thermische handtekening die de smalle infraroodstrook korte tijd op het object heeft achtergelaten. De software gebruikt twee verschillende kijkhoeken en de resulterende offset in het geregistreerde streeppatroon om de ruimtelijke coördinaten te reconstrueren.
Vervolgens worden de gegevens samengevoegd tot de exacte afmetingen van het meetobject. De thermische energie die wordt gebruikt voor de 3D-analyse is zo laag dat het object niet wordt beschadigd. Het temperatuurverschil tussen het verwarmde en onverwarmde oppervlak is meestal minder dan 3 °C. Het systeem is met succes getest in combinatie met een robot. Toepassingen zijn denkbaar in grootschalige industriële fabricageprocessen zoals in de halfgeleider- en automobielindustrie.
Foto: Fraunhofer-IOF