
09/04/2024
Door Ad Spijkers
Nieuwe benadering van robotaansturing vermindert het energieverbruik tot 25%.
De hedendaagse productie kenmerkt zich door kleinere batchgroottes (in plaats van massaproductie), complexere productielijnen, toenemende concurrentiedruk en onstabiele toeleveringsketens. Tegen deze achtergrond richt het Frans-Duitse onderzoeksproject GreenBotAI zich op robotica. Drie hoofddoelstellingen staan centraal:
- het waarborgen van de productiecontinuïteit, zelfs in tijden van pandemie;
- het versterken van de Europese onafhankelijkheid op het gebied van productieautomatisering;
- het aanzienlijk terugdringen van het energieverbruik van robottoepassingen in Europese fabrieken.
Agile benadering
Technisch gezien richt GreenBotAI zich op de reactie- en latentietijden in industriële robotica, geoptimaliseerde padplanning en het uitvoeren van goed gedefinieerde taken terwijl de robot in beweging is ('on the fly'). Zonder te stoppen is het bijvoorbeeld mogelijk om 2D-beelden vast te leggen voor objectherkenning voor de gewenste handling- of montagetaak. Het Fraunhofer-Institut für Werkzeugmaschinen und Umformtechnik (IWU) in Chemnitz is de projectleider van het Frans-Duitse onderzoek.
Het project richt zich op een agile benadering van het omgaan met materialen en werkstukken. Algoritmen uit de kunstmatige intelligentie zouden de productie meer flexibiliteit moeten geven en de productie in verschillende industriële sectoren moeten versnellen. Het doel is intelligente robotica te creëren die complexe taken spontaan kan uitvoeren. De vereiste componenten in de hardware, deep learning methoden voor bewaking, verbeteringen in de gegevensverwerking en foutcontrole zullen naar verwachting een generatiewisseling in de robotica inluiden.
Lager energieverbruik
GreenBotAI werkt aan verschillende hefbomen om het energieverbruik van bestaande robots met maximaal 25% te verminderen. Deze omvatten AI-modellen met minder data, versnelde grijptaken en verminderde rekenkracht.
Op de Hannover Messe laten de projectpartners zien wat ze tot nu toe hebben bereikt. Een individuele opname in 2D met industriële cameratechnologie (One-Shot Demonstration) van het onderdeel en weinig rekenkracht zijn voldoende om de robot dit onderdeel naar wens op te pakken, te inspecteren en te positioneren. De software Xeidana, ontwikkeld bij Fraunhofer IWU, controleert of de robot het juiste onderdeel heeft opgepakt.
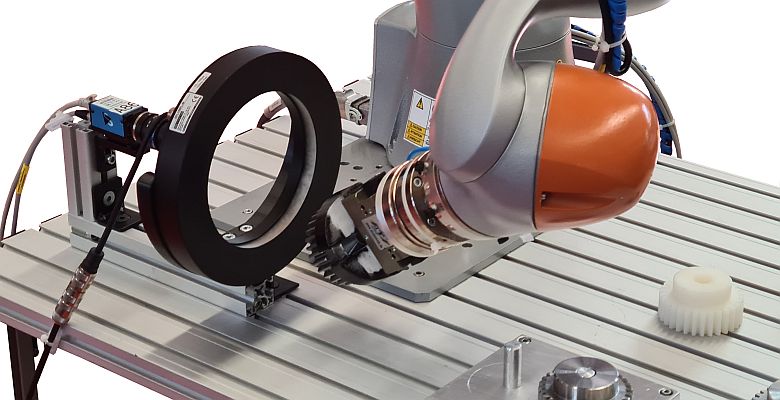
Bezoekers kunnen op een willekeurige plek op een tafel in de werkruimte van een cobot een tandwiel plaatsen. Op basis van de beeldinformatie bepaalt de software de posities van alle objecten ten opzichte van de cobot, berekent diens traject en bepaalt de grijppositie. De cobot pakt vervolgens het tandwiel op en inspecteert dit, volledig afhankelijk van de beeldinformatie. Hier speelt real-time evaluatie van krachtdata een rol. De cobot wordt begeleid bij het inpassen van het opgepakte tandwiel in een tweede tandwiel, met behulp van een slimme toepassing van AI die menselijke aanraking nabootst. Een digital twin visualiseert bovendien alle echte acties van de robot. Bezoekers kunnen de montage- en geïntegreerde kwaliteitscontroletoepassing live meemaken.
Projectpartners in GreenBotAI zijn behalve Fraunhofer IWU onder meer de Hochschule München, softwareontwikkelaar Inbolt SAS in Parijs en de École Nationale Supérieure d'Arts et Métiers met vestigingen in Aix-enProvence, Lille en Chalon-sur-Saone.
Foto: Fraunhofer IWU