
27/04/2022
Door Ad Spijkers
Collectief gedrag en zwermbewegingspatronen zijn overal in de natuur te vinden. Ook robots kunnen in zwermen handelen.
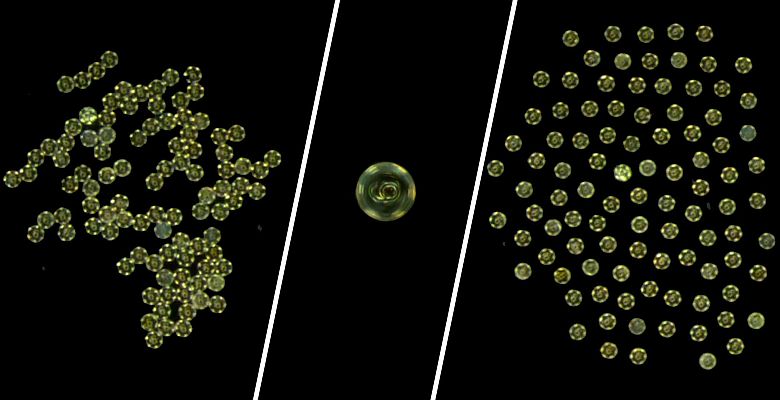
Onderzoekers van het Max Planck Institut für Intelligente Systeme (MPI-IS) in Stuttgart, Cornell University in Ithaca (New York) en Shanghai Jiao Tong University hebben microrobots ontwikkeld die in elke formatie collectief kunnen bewegen. De deeltjes kunnen hun bewegingspatronen snel opnieuw configureren. Drijvend op een wateroppervlak kunnen de miniatuurrobots in cirkels draaien, dansen, opbollen tot een klont, zich uitspreiden als gas of een rechte lijn vormen als parelsnoeren aan een touwtje.
Een enkele robot is iets groter dan de diameter van een mensenhaar. Ze zijn 3D-geprint uit een polymeer en gecoat met een dunne laag kobalt. Dankzij het metaal zijn de microrobots magnetisch geladen. Draadspoelen omringen de experimentele opstelling. Hun magneetveld maakt het mogelijk om de deeltjes in een één centimeter brede plas water nauwkeurig te controleren. Als de microrobots bijvoorbeeld een lijn vormen, kunnen de onderzoekers de robots zo bewegen dat ze letters in het water 'schrijven'.
Collectief gedrag
Collectief gedrag en zwermbewegingspatronen zijn overal in de natuur te vinden, bijvoorbeeld bij vogels en vissen. Ook robots kunnen worden geprogrammeerd om in zwermen te handelen. Een paar jaar geleden vestigde een technologiebedrijf een nieuw Guinness World Record met een drone-lichtshow, waarbij ingenieurs enkele honderden drones zo programmeerden dat ze als een zwerm vogels enkele minuten een patroon in de nachtelijke hemel tekenden.
Elke drone in deze zwerm was uitgerust met rekenkracht die hem in alle mogelijke richtingen stuurde. Maar wat als het individuele deeltje zo klein is dat er geen ruimte is voor rekenkracht? Als een robot slechts 300 µm groot is, biedt hij niet genoeg ruimte voor een computer die met een algoritme geprogrammeerd zou kunnen worden.
Drie krachten
Er zijn drie krachten in het spel om het gebrek aan rekenkracht te compenseren. Een daarvan is de magneetkracht. De tweede kracht is de vloeibare omgeving, het water rond de deeltjes. Wanneer deeltjes in een draaikolk zwemmen, verdringen ze het water, waardoor de andere deeltjes in het systeem worden aangetast. De snelheid van de vortex en zijn grootte bepalen hoe de deeltjes op elkaar inwerken. Ten derde hebben twee deeltjes wanneer ze naast elkaar zwemmen de neiging naar elkaar toe te drijven. Ze krommen het wateroppervlak zodat ze elkaar langzaam naderen. Omgekeerd kan dit effect er ook voor zorgen dat twee dingen elkaar afstoten.
De wetenschappers gebruiken alle drie krachten om een gecoördineerd, collectief bewegingspatroon van enkele tientallen microrobots binnen een systeem te creëren. Als de robots een parkoers volgen, kiest de formatie die daar het beste bij past. Als er maar een smalle doorgang is, gaan de microrobots in een rij staan en spreiden ze zich weer uit als ze naar buiten komen. De wetenschappers kunnen de robots ook laten dansen.
Algoritmen
Al deze verschillende manieren van voortbewegen en formaties worden mogelijk gemaakt door externe rekenkracht. Er wordt een algoritme geprogrammeerd dat een roterend of oscillerend magnetisch veld genereert, dat op zijn beurt de gewenste beweging en herconfiguratie aanstuurt. Afhankelijk van hoe de magnetische velden veranderen, gedragen de microrobots zich anders. De onderzoekers veranderen de ene kracht en dan de andere totdat ze het gewenste bewegingspatroon krijgen.
Als ze het magneetveld te veel laten draaien, is de kracht die het water laat bewegen te sterk en bewegen de deeltjes van elkaar weg. Als het te langzaam is, is het effect dat de deeltjes aantrekt te groot. De onderzoekers moeten een balans vinden tussen deze drie factoren.
Toepassingen
De onderzoekers willen een systeem ontwikkelen dat nog kleiner is. Ze willen de deeltjes in de toekomst nog maar een micrometer klein maken. Deze collectieven zouden op een dag het menselijk lichaam kunnen binnendringen en door complexe omgevingen navigeren, bijvoorbeeld om medicijnen toe te dienen, blokkades op te heffen of moeilijk bereikbare gebieden te stimuleren.
Robotcollectieven die snel kunnen schakelen tussen verschillende bewegingspatronen zijn zeldzaam. Dergelijke veelzijdige systemen zijn nuttig bij gebruik in complexe omgevingen. De onderzoekers zien hun onderzoek als een blauwdruk voor toekomstige biomedische toepassingen, minimaal invasieve behandelingen of om het milieu te beschermen.
Foto: MPI-IS