
08/07/2022
Door Ad Spijkers
De ontwikkeling van een duurzaam materiaal voor flexibele kunstmatige spieren maakt ook de weg vrij voor robots en draagbare apparaten die natuurlijke beweging nabootsen.
Californische onderzoekers hebben een nieuw materiaal en productieproces ontwikkeld voor het creëren van kunstmatige spieren die sterker en flexibeler zijn dan hun biologische tegenhangers. Het creëren van een kunstmatige spier om arbeid mogelijk te maken en kracht en aanraking te detecteren, was een van de grote uitdagingen van wetenschap en techniek. De onderzoekers zijn verbonden aan de University of California Los Angeles en het non-profit wetenschappelijk onderzoeksinstituut SRI International in Menlo Park (bij San Fransisco).
Di-elektrische elastomeren
Wil een zacht materiaal in aanmerking komen voor gebruik als kunstmatige spier, dan moet het mechanische energie kunnen afgeven en levensvatbaar blijven onder zware omstandigheden. Het mag na herhaalde werkcycli zijn vorm en kracht niet gemakkelijk verliezen. Veel materialen werden beschouwd als kanshebbers voor het maken van kunstmatige spieren. Maar di-elektrische elastomeren (lichtgewicht materialen met een hoge elastische energiedichtheid) bieden een optimale flexibiliteit en taaiheid.
Het gaat om elektro-actieve polymeren, natuurlijke of synthetische stoffen die in grootte of vorm kunnen veranderen wanneer ze worden gestimuleerd door een elektrisch veld. Ze kunnen worden gebruikt als actuatoren, waardoor machines kunnen werken door elektrische energie om te zetten in mechanisch werk.
De meeste di-elektrische elastomeren zijn gemaakt van acryl of siliconen, maar beide materialen hebben nadelen. Hoewel traditionele acryl een hoge activeringsbelasting kan bereiken, moet het vooraf worden uitgerekt en mist het flexibiliteit. Siliconen zijn gemakkelijker te maken, maar kunnen niet tegen een hoge belasting.
PHDE
Door gebruik te maken van in de handel verkrijgbare chemicaliën en met behulp van een uithardingsproces met ultraviolet licht, creëerde het onderzoeksteam een verbeterd materiaal op acrylbasis. Dit is buigzamer, beter af te stemmen en eenvoudiger te schalen zonder zijn kracht en uithoudingsvermogen te verliezen. Het acrylzuur ervoor zorgt dat er meer waterstofbruggen kunnen worden gevormd, waardoor het materiaal beweeglijker wordt. De onderzoekers pasten ook de verknoping tussen polymeerketens aan, waardoor de elastomeren zachter en flexibeler werden.
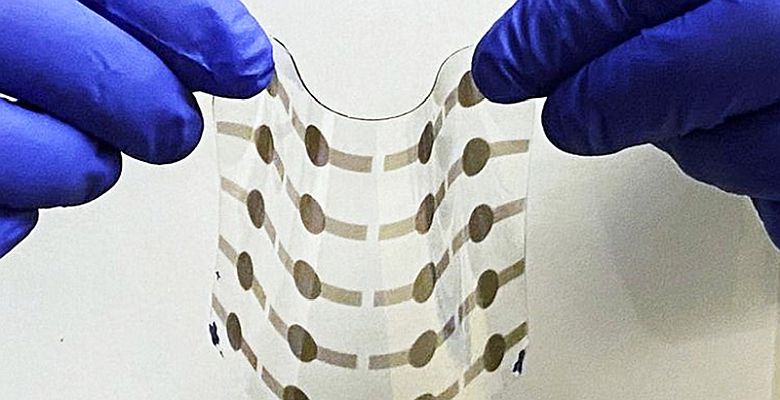
De resulterende dunne, verwerkbare, hoogwaardige di-elektrische elastomeerfilm (PHDE) wordt vervolgens tussen twee elektroden geplaatst om elektrische energie in beweging om te zetten als een actuator. Elke PHDE-film is zo dun en licht als een stuk mensenhaar, ongeveer 35 µm dik. Wanneer meerdere lagen op elkaar worden gestapeld, worden ze een miniatuur elektrische motor die kan werken als spierweefsel. Dit kan genoeg energie produceren voor beweging van kleine robots of sensoren. De onderzoekers hebben stapels PHDE-films gemaakt variërend van vier tot vijftig lagen.
Kunstmatige spieren
Kunstmatige spieren die zijn uitgerust met PHDE-actuatoren kunnen meer MPa aan kracht genereren dan biologische spieren. Ze vertonen ook drie tot tien keer meer flexibiliteit dan natuurlijke spieren. Meerlagige zachte films worden meestal vervaardigd via een 'nat' proces waarbij vloeibare hars wordt afgezet en uitgehard. Maar dat proces kan resulteren in ongelijke lagen, wat zorgt voor een slecht presterende actuator. Om deze reden zijn tot nu toe veel actuatoren alleen succesvol geweest met enkellaagse DE-films.
Het onderzoek in Californië omvat een 'droog' proces waarbij de films met een mes in lagen worden aangebracht. Vervolgens wordt het onder ultraviolet licht uitgehard waardoor de lagen uniform worden. Dit verhoogt de energie-output van de actuator, zodat het apparaat complexere bewegingen kan ondersteunen.
Het vereenvoudigde proces en de flexibele en duurzame aard van de PHDE maken de fabricage van nieuwe zachte actuatoren mogelijk. Deze kunnen buigen om te springen, zoals spinnenpoten, of opwinden en ronddraaien. De onderzoekers toonden ook het vermogen van de PHDE-actuator aan om een bal ter grootte van een erwt te gooien die 20 keer zwaarder is dan de PHDE-films. De actuator kan ook uitzetten en samentrekken als een diafragma wanneer een spanning wordt in- en uitgeschakeld, wat een glimp geeft van hoe kunstmatige spieren in de toekomst kunnen worden gebruikt.
De vooruitgang kan leiden tot zachte robots met verbeterde mobiliteit en uithoudingsvermogen, en nieuwe draagbare en haptische technologieën met tastzin. Het fabricageproces kan ook worden toegepast op andere zachte dunne film materialen voor toepassingen zoals microfluïdische technologieën, weefseltechnologie of microfabricage.
Foto: UCLA, Qibing Pei