
04/05/2023
Door Ad Spijkers
Een door een spoel aangedreven robotvis zou onderwateronderzoek toegankelijker kunnen maken.
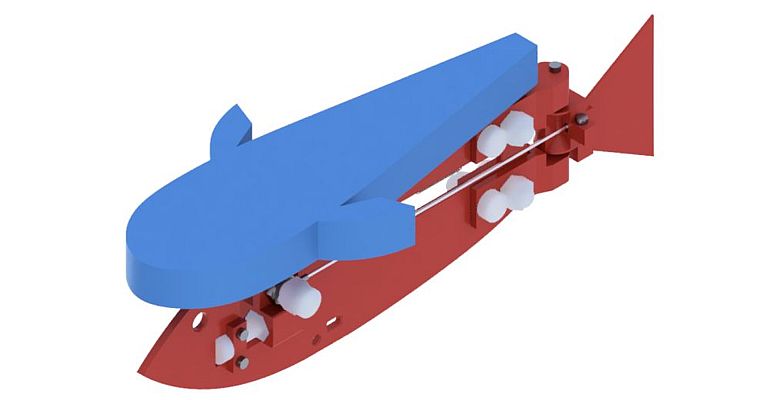
De robotvis is ontworpen door wetenschappers van de University of Bristol, is voorzien van een gedraaid en opgerold polymeer (twisted and coiled polymer, TCP) om hem vooruit te drijven. Het lichtgewicht goedkope apparaat is afhankelijk van temperatuurverandering om beweging te genereren, wat ook zijn snelheid beperkt.
TCP
Een TCP werkt door zich bij verhitting samen te trekken als spieren, waarbij de energie wordt omgezet in mechanische beweging. De TCP die in dit vaartuig wordt gebruikt, wordt opgewarmd door Joule-verwarming: de stroom door een elektrische geleider produceert thermische energie en verwarmt de geleider. Door de afstand tussen de TCP aan de ene kant van de robotvis en de veer aan de andere kant te minimaliseren, wordt de vin aan de achterkant geactiveerd. Hierdoor kan de robotvis nieuwe snelheden bereiken.
Het golvende klapperen van de staartvin werd gemeten met een frequentie van 2 Hz, twee golven per seconde. De frequentie van de elektrische stroom is gelijk aan de frequentie van de staartflap. De bevindingen bieden een nieuwe route om de actuatiefrequentie van TCP's te verhogen door middel van thermomechanisch ontwerp. Ze tonen de mogelijkheid van het gebruik van TCP's met hoge frequentie in waterige omgevingen.
Actuator
Een TCP actuator is een veelbelovende nieuwe aandrijving met aantrekkelijke eigenschappen: lage massa, goedkope hoge energiedichtheid en eenvoudig fabricageproces. Ze kunnen worden gemaakt van gemakkelijk te beoordelen materialen, zoals een vislijn. De polymer trekken samen en zorgen voor een lineaire werking wanneer ze worden verwarmd. Gezien de tijd die nodig is voor warmteafvoer tijdens de ontspanningsfase, worden ze echter langzaam.
Door het structurele ontwerp van het antagonistische TCP-veer-spierpaar te optimaliseren en hun ankerpunten dichter bij elkaar te brengen, kon de achterste vin onder een grotere hoek zwaaien door dezelfde hoeveelheid TCP-activering. Hoewel hiervoor meer kracht nodig is, is TCP een sterke actuator met een hoge arbeidsenergiedichtheid en kan hij nog steeds de vin aandrijven.
Toepassing
Tot nu toe werden TCP's vooral gebruikt voor toepassingen zoals draagbare apparaten en robothanden. Dit onderzoek opent meer toepassingsgebieden waar TCP kan worden gebruikt, zoals robots voor verkenning en bewaking onder water. De robotvissen zwommen met de hoogste activeringsfrequentie die tot nu toe in een echte TCP-toepassing is gevonden en ook met de hoogste voortbewegingssnelheid van een TCP-toepassing tot nu toe. Dit biedt mogelijkheden voor toepassing op verschillende gebieden.
De onderzoekers willen de schaal uitbreiden en een op een mesaalachtige vis geïnspireerde TCP-aangedreven lintvinrobot te ontwikkelen die behendig in water kan zwemmen.
Ill.: Tsam Lung You, University of Bristol