
05/12/2023
Door Ad Spijkers
Geïnspireerd door een slak hebben wetenschappers een robotprototype ontwikkeld dat ooit microplastics van wateroppervlakken kan opscheppen.
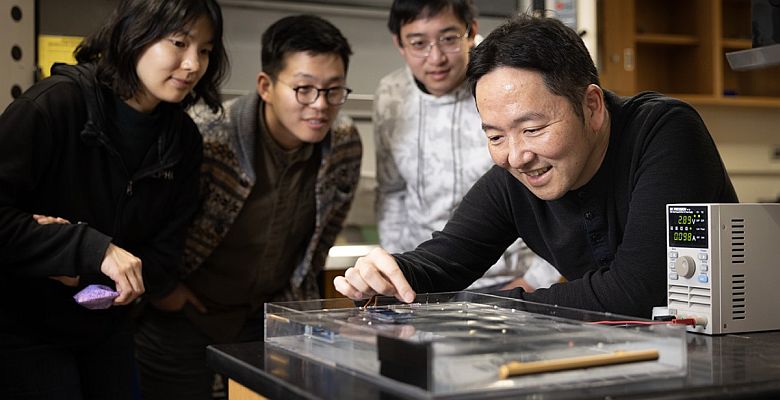
Het ontwerp van de robot is gebaseerd op de Hawaiiaanse appelslak (Pomacea canaliculate), een gewone aquariumslak die de golvende beweging van zijn voet gebruikt om de wateroppervlaktestroming aan te drijven en drijvende voedseldeeltjes op te zuigen. Onderzoekers aan Cornell University in Ithaca (zo'n 350 km noordoostelijk van New York City) lieten zich door het diertje inspireren bij de ontwikkeling van een robotje dat op een dag microplastics uit oceanen, zeeën en meren kan halen. Op de foto bestuderen ze het gedrag van hun vinding tijdens een test.
Microplastics
Volgens de Economische en Sociale Raad van de Verenigde Naties is plasticafval verantwoordelijk voor 80% van alle zeevervuiling. Jaarlijks belandt er 8 tot 10 miljoen ton plastic in de oceaan. Momenteel zijn apparaten voor het verzamelen van plastic vooral afhankelijk van sleepnetten of transportbanden om groter afval uit het water te verzamelen en te verwijderen.
Ze missen echter de fijngevoeligheid die nodig is voor het ophalen van microplastics. Deze kleine plasticdeeltjes kunnen worden ingeslikt en in de weefsels van zeedieren terechtkomen, waardoor ze in de voedselketen terechtkomen. Hierdoor veroorzaken ze een gezondheidsprobleem en worden mogelijk kankerverwekkend voor de mens.
Prototype
De onderzoekers werden geïnspireerd door de manier waarop deze slak voedseldeeltjes verzamelt op het grensvlak (water en lucht). Ze ontwikkelen een apparaat dat mogelijk microplastics in de oceaan of aan het oppervlak van een waterreservoir kan verzamelen. Het prototype, aangepast ten opzichte van een bestaand ontwerp, zou moeten worden opgeschaald om praktisch te zijn in een echte omgeving.
De onderzoekers gebruikten een 3D-printer om een flexibel tapijtachtig apparaatje te maken dat kan golven. Een spiraalvormige structuur aan de onderkant van het laken roteert als een kurkentrekker, waardoor het tapijt gaat golven en een voortbewegende golf op het water ontstaat. Het analyseren van de beweging van de vloeistof was de sleutel tot dit onderzoek. De onderzoekers moesten de vloeistofstroom begrijpen om het pompgedrag te karakteriseren.
Het vloeistofpompsysteem, gebaseerd op de techniek van de slak, staat open voor de lucht. De onderzoekers berekenden dat een soortgelijk gesloten systeem, waarbij de pomp is ingesloten en een buis gebruikt om water en deeltjes aan te zuigen. Dit zou een hoge energie-input vereisen om te kunnen werken. Aan de andere kant is het slakachtige open systeem veel efficiënter. Het prototype, hoewel klein, werkt bijvoorbeeld op slechts 5 V elektriciteit terwijl het nog steeds effectief water aanzuigt. Door het gewicht van een batterij en motor moeten de onderzoekers mogelijk een drijfapparaat aan de robot bevestigen om te voorkomen dat deze zinkt.
De wetenschappelijke publicatie vindt u hier.
Foto: Jason Koski/Cornell University