
20/10/2023
Door Ad Spijkers
Dankzij elektromyografische (EMG) signalen kunnen gebruikers met een robotische enkelprothese een natuurlijke stabiliteit bereiken.
Robotische prothetische enkels die worden bestuurd door zenuwimpulsen zorgen ervoor dat geamputeerden 'natuurlijker' kunnen bewegen, waardoor hun stabiliteit wordt verbeterd. Dit blijkt uit een nieuwe studie van de North Carolina State University in Raleigh en de University of North Carolina in Chapel Hill, 45 km westelijker.
Controle
Dit werk concentreerde zich op 'posturale controle'. Als we stilstaan, corrigeert ons lichaam zich voortdurend om ons stabiel te houden. Als iemand bijvoorbeeld tegen ons aan botst terwijl we in de rij staan, maken onze benen een breed scala aan bewegingen waarvan we ons niet eens bewust zijn, om ons rechtop te houden.
De onderzoekers werken met mensen die een amputatie van de onderste ledematen hebben ondergaan. Zij vertellen dat het bereiken van dit soort stabiliteit met prothesen een aanzienlijke uitdaging is. De studie toont aan dat robotische prothetische enkels die worden aangestuurd met behulp van elektromyografische (EMG) signalen het mogelijk maken dat gebruikers deze natuurlijke stabiliteit bereiken. EMG-signalen zijn de elektrische signalen die worden geregistreerd door de spieren van een individu.
De nieuwe studie bouwt voort op eerder werk, waaruit bleek dat neurale controle van een aangedreven enkelprothese een reeks vaardigheden kan herstellen, waaronder staan op uitdagende oppervlakken en hurken.
Werking
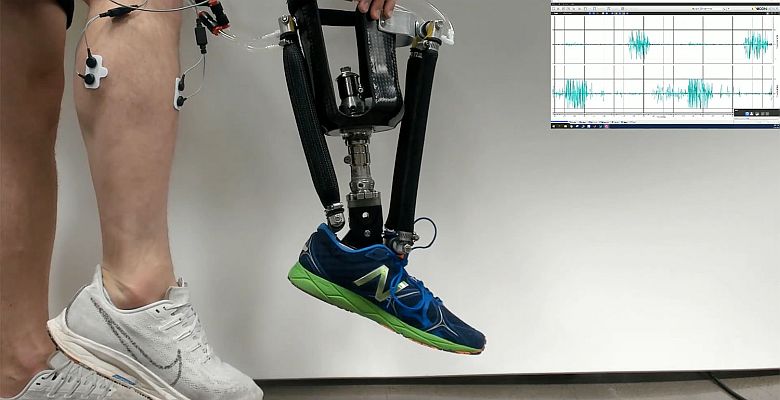
Voor deze studie werkten de onderzoekers met vijf mensen die aan één been een amputatie onder de knie hadden. De deelnemers kregen een prototype van een robotische prothese-enkel die reageert op EMG-signalen die worden opgevangen door sensoren op het been. In principe worden de sensoren over de spieren op de plaats van de amputatie geplaatst. Wanneer een deelnemer de geamputeerde ledemaat wil verplaatsen, stuurt de restspier elektrische signalen in het onderste ledemaat. De sensoren pikken deze signalen op via de huid en vertalen die in commando’s voor de prothese.
De onderzoekers gaven de studiedeelnemers een algemene training met behulp van het prototype apparaat, zodat ze enigszins bekend waren met de technologie. De deelnemers kregen vervolgens de opdracht om te reageren op een 'verwachte verstoring'. Ze moesten reageren op iets dat hun evenwicht zou kunnen verstoren. In het dagelijks leven kan dit zoiets zijn als het vangen van een bal of het ophalen van de boodschappen. Om de omstandigheden in de loop van het onderzoek nauwkeurig te kunnen reproduceren, ontwikkelden de onderzoekers een mechanisch systeem dat was ontworpen om de stabiliteit van de deelnemers op de proef te stellen.
Studie
Aan de studiedeelnemers werd gevraagd om onder twee omstandigheden te reageren op de verwachte verstoring: met behulp van de prothesen die ze normaal gebruikten, en met het gebruik van het robotprothetische prototype. De onderzoekers ontdekten dat de deelnemers aan de studie aanzienlijk stabieler waren bij het gebruik van het robotprototype. Ze zouden minder snel struikelen of vallen.
Concreet konden de deelnemers dankzij het robotprototype hun houdingscontrolestrategie veranderen. Voor mensen met een intact onderste ledemaat begint de houdingsstabiliteit bij de enkel. Mensen die hun onderste ledematen hebben verloren, moeten normaal gesproken compenseren voor het gebrek aan controle over de enkel. Door het gebruik van de robotenkel die reageert op EMG-signalen konden gebruikers terugkeren naar hun instinctieve reactie om de stabiliteit te behouden.
In een apart deel van het onderzoek vroegen de wetenschappers aan de deelnemers heen en weer te zwaaien terwijl ze hun normale prothese gebruikten en terwijl ze het prototype van de robotprothese gebruikten. De deelnemers werden voorzien van sensoren die waren ontworpen om de spieractiviteit over het hele onderlichaam te meten.
Het vervolg
De onderzoekers constateerden dat de spieractiviteitspatronen in het onderlichaam heel verschillend waren als mensen de twee verschillende prothesen gebruikten. In principe leken de spieractivatiepatronen bij het gebruik van de prototypeprothese sterk op de patronen die we zien bij mensen die twee intacte onderste ledematen volledig kunnen gebruiken. Dat betekent dat het prototype het gedrag van het lichaam zo goed nabootst dat de 'normale' neurale patronen van mensen kunnen terugkeren. Dit doet vermoeden dat de technologie enigszins intuïtief zal zijn voor gebruikers.
De onderzoekers denken dat dit een klinisch significante bevinding is, omdat houdingsstabiliteit een belangrijk probleem is voor mensen die prothesen gebruiken. Ze voeren nu een grotere proef uit met meer mensen om zowel de effecten van de technologie aan te tonen als om te identificeren welke individuen er het meeste baat bij kunnen hebben.
De wetenschappelijke publicatie vindt u hier.
Foto: Aaron Fleming