
18/09/2023
Door Ad Spijkers
Een innovatieve zelforganiserende aanpak zorgt voor een nauwkeurigere collectieve perceptie in robotzwermen.
Het nemen van groepsbeslissingen is geen gemakkelijke taak, vooral als de besluitvormers een zwerm robots vormen. Om de autonomie van de zwermen in de collectieve perceptie te vergroten, heeft een onderzoeksteam van het onderzoekslaboratorium voor kunstmatige intelligentie aan de Université Libre de Bruxelles een innovatieve zelforganiserende aanpak voorgesteld. Hierbij fungeert één robot tegelijk tijdelijk als 'brein' om informatie van de groep te consolideren. De onderzoekers lieten zien dat hun methode de nauwkeurigheid van de collectieve perceptie verbetert door bronnen van onzekerheid te verminderen.
Nieuwe aanpak
Door aspecten van gecentraliseerde en gedecentraliseerde controle te combineren, realiseerden de onderzoekers zich de voordelen van beide in één systeem, waarbij de schaalbaarheid en fouttolerantie van gedecentraliseerde benaderingen behouden bleven terwijl de nauwkeurigheid van gecentraliseerde benaderingen werd geïntegreerd. De aanpak stelt robots in staat hun relatieve posities binnen het systeem te begrijpen en hun sensorinformatie op een bepaald punt samen te voegen zonder dat een globaal of statisch communicatienetwerk of externe referenties nodig is.
Bovendien maakt de aanpak van de onderzoekers het voor het eerst mogelijk om gecentraliseerde methoden voor het samenvoegen van informatie van meerdere sensoren toe te passen op een zelforganiserend systeem. Multisensorfusietechnieken werden voorheen alleen gedemonstreerd in volledig gecentraliseerde systemen.
Ad-hoc netwerk
De onderzoekers testten de zelforganiserende hiërarchiebenadering aan de hand van drie benchmarkbenaderingen. Ze ontdekten dat hun aanpak uitblonk in termen van nauwkeurigheid, consistentie en reactietijd onder de geteste omstandigheden. In de experimentele opstelling verzamelt een zwerm gesimuleerde drones en grondrobots tweedimensionale ruimtelijke gegevens. Dit doen ze door objecten te detecteren die zijn verspreid in een arena en een gezamenlijk oordeel te vormen over de objectdichtheid. De robots moeten vertrouwen op hun korteafstandssensoren om het aantal objecten per eenheid af te leiden.
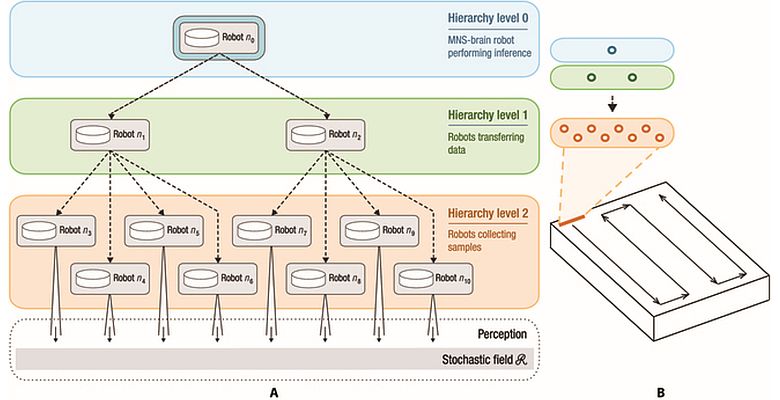
Deze nieuwe aanpak maakt volgens de wetenschappers gebruik van een 'dynamisch ad-hoc hiërarchisch netwerk'. Het is gebouwd op een soort algemeen raamwerk dat bekend staat als een samenvoegbaar zenuwstelsel, waarbij robots op elk niveau van de hiërarchie verschillende rollen hebben in de besluitvormingsprocessen. Hierin kunnen robots hun verbindingen en relatieve posities naar behoefte veranderen, ook al is elke robot beperkt tot uitsluitend communicatie met zijn directe buren.
Hiërarchie
In de benadering van de auteurs is de 'hersenrobot' op het hoogste niveau verantwoordelijk voor het uitvoeren van gevolgtrekkingen en het stroomafwaarts verzenden van bewegingsinstructies. De robots op het middelste niveau beheren de gegevensoverdracht en nemen deel aan het balanceren van globale en lokale bewegingsdoelen (bijvoorbeeld tijdens het vermijden van obstakels). De meerderheid op het onderste niveau voert monsterverzameling uit terwijl de lokale beweging wordt beheerd.
Toekomstig onderzoek naar dit onderwerp zou geavanceerde inferentiemethoden kunnen onderzoeken en de robuustheid van bemonsteringsmethoden kunnen uitbreiden onder andere typen robotstoringen of uitdagende omgevingsomstandigheden, zoals omgevingen met grote obstakels of onregelmatige grenzen.
De wetenschappelijke publicatie vindt u hier.
Ill.: Aryo Jamshidpey et al.