
26/08/2024
Door Ad Spijkers
De Picotaur van Carnegie Mellon University kan rennen, draaien, lasten duwen en miniatuurtrappen beklimmen.
Stel je voor: honderden robots ter grootte van een mier klimmen over puin, onder rotsen en tussen puin om de schade van een ingestort gebouw te inspecteren voordat menselijke reddingswerkers ter plaatse op onderzoek uitgaan. Door robots met poten te verkleinen tot de grootte van een insect, kun je kleine ruimtes bereiken die mensen en grote robots niet kunnen bereiken. Een zwerm kleine robots kan zelfs samenwerken zoals hun insectenachtige tegenhangers om objecten te vervoeren en elkaar te beschermen.
Microrobot
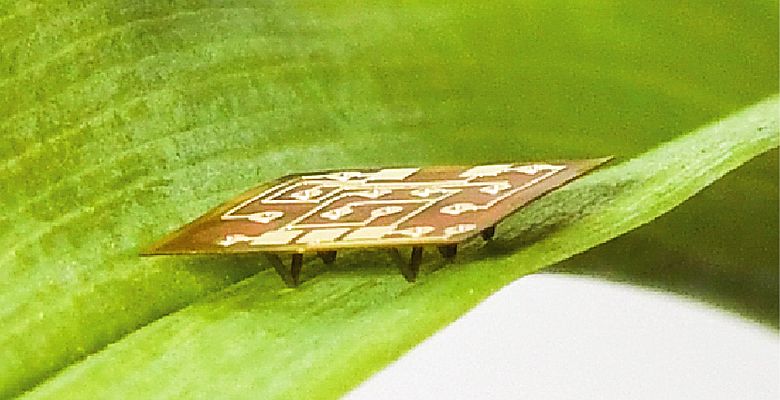
Picotaur is een nieuwe robot uit de laboratoria van Carnegie Mellon University in Pittsburgh. Volgens de wetenschappers is het de eerste van zijn formaat die kan rennen, draaien, lasten kan duwen en miniatuurtrappen kan beklimmen (foto). De robot heeft poten die worden aangestuurd door meerdere actuatoren, zodat hij verschillende voortbewegingsmogelijkheden kan bereiken. Met meerdere looppatronen kan hij lopen zoals andere hexapodrobots, vergelijkbaar met hoe een kakkerlak beweegt. Maar hij kan ook van de grond springen om obstakels te overwinnen.
De 7,9 mm grote robot werd 3D-geprint met behulp van tweefotonpolymerisatie, een proces dat eerder succesvol was bij het bouwen van verschillende kleinschalige robotsystemen zoals microbots, microgrippers, microzwemmers en microsensoren. Met behulp van dit proces konden de onderzoekers het twee vrijheidsgraden koppelingsmechanisme miniaturiseren waarmee Picotaur staphoogtes kan overbruggen en gemakkelijk kan wisselen tussen lopen en springen.
De onderzoekers testten Picotaur's vermogen om lasten te duwen door een miniatuur voetbalveld te creëren. De robot heeft genoeg kracht om een balletje te duwen en vervolgens te draaien, zichzelf te heroriënteren en de bal in het net te volgen.
Microfabricage
Historisch gezien was microfabricage-technologie beperkt in het produceren van microschaalapparaten in tweedimensionale ruimtes, zoals voor de halfgeleiderindustrie. Nu is het mogelijk om de ontwerpruimte uit te breiden van 2D naar 3D. Het proces is te gebruiken om kleinschalige robotsystemen te creëren voor verschillende toepassingen, bijvoorbeeld microgrippers voor het grijpen en afleveren van kleine objecten voor chirurgische toepassingen en productietoepassingen op microschaal.
Maar microrobotica bevindt zich nog in een vroeg stadium van ontwikkeling en er zijn nog uitdagingen die overwonnen moeten worden voordat volledig geïntegreerde robots in het veld verschijnen. Het team hoopt bijvoorbeeld zonnecellen aan de bovenkant van de robot toe te voegen, zodat deze zonder kabels van stroom kan worden voorzien.
Mensen zien grotere robotsystemen in de wereld en accepteren ze. De onderzoekers hopen dat mensen zich met dit werk kunnen voorstellen dat er kleinschalige robots om ons heen werken en dat ze begrijpen dat die toekomst niet ver weg is. Ze kunnen gaan nadenken, waar microrobots nuttig zouden kunnen zijn en zelfs toepassingen vinden waar ze nog niet aan hebben gedacht. Maar wat de voetballende capaciteiten betreft: met die snelheid kunnen de microrobots voorlopig maar beter niet meedoen met de RoboCup.
Foto: Carnegie Mellon University