
14/11/2023
Door Ad Spijkers
Koreaanse onderzoekers ontwikkelden een techniek waarmee fragiele voorwerpen door robotica kunnen worden overgebracht en vrijgegeven
Gekko's beschikken over schijnbaar subtiele adhesiekrachten waarmee ze de zwaartekracht kunnen trotseren, zich aan muren kunnen vastklampen en over plafonds kunnen lopen. Dit heeft een team onderzoekers in Zuid-Korea geïnspireerd om een robotapparaat te bouwen dat delicate materialen kan oppakken en loslaten zonder schade aan te richten. Het team wordt gevormd door wetenschappers aan de Kyungpook National University (vestigingen in Daegu en Sangju) en de Dong-A University in Busan. Ze hopen dat het resultaat kan worden toegepast op de overdracht van objecten door robotsystemen.
Gekko's
Het droge maar plakkerige geheim van de poot van een gekko ligt in de coating van kleine haartjes, gemaakt van eiwitten, genaamd microsetae. Deze haartjes zijn ongeveer 100 µm lang en 5 µm in diameter. Elk haar verdeelt zich in een aantal takken die eindigen in platte driehoekige kussentjes. Deze zogeheten spatels zijn zo klein dat hun moleculen interageren met die van het oppervlak waar de gekko op klimt. Hierdoor ontstaan zwakke aantrekkingskrachten tussen deze moleculen, bekend als de van der Waals-kracht. Deze kracht is sterk genoeg om de gekko op zijn plaats te houden.
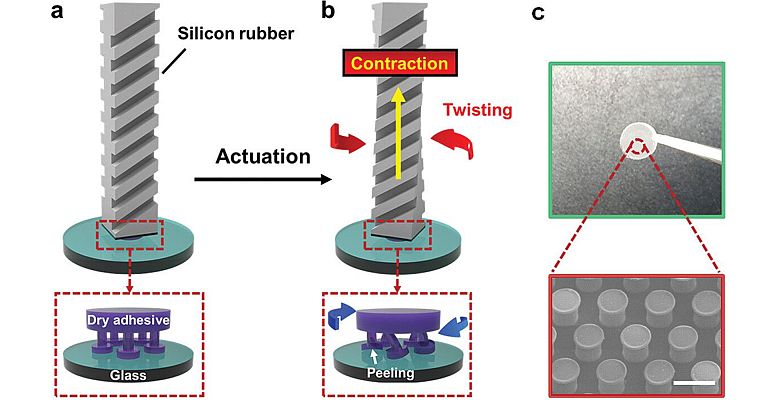
Het aangeboren hechtvermogen van de gekko trekt al lang de aandacht van veel onderzoekers en heeft het gebruik van zijn hechtingsmechanisme in de robotica geïnspireerd. De Koreanen gebruiken een paddestoelvormige droge lijm, die dit mechanisme nabootst, is gebruikt om materialen op robotachtige wijze op te pakken. De kracht die nodig is om de lijm los te maken van het materiaaloppervlak kan echter leiden tot schade, vooral als het materiaal kwetsbaar is, zoals glas.
Ontwikkeling
Er zijn problemen geweest om de lijm gemakkelijk los te laten komen. Om deze kleefkrachten in robotsystemen te kunnen benutten, is het noodzakelijk dat de robot niet alleen een object kan oppakken, maar er ook gemakkelijk van kan loskomen en het object op de gewenste locatie kan achterlaten.
In hun onderzoek loste het team dit loslaatprobleem op door een, door vacuüm aangedreven, apparaat van zacht siliconenrubber te gebruiken. Om de droge lijm los te maken zonder het kwetsbare object dat wordt verplaatst te beschadigen, werd een nieuwe losmaakmethode geïntroduceerd. Deze omvat een draaiende en optillende beweging die de droge lijm van het glasoppervlak trekt zonder deze te beschadigen. De onderzoekers ontdekten dat de toevoeging van deze draaiende beweging een tienvoudige vermindering veroorzaakte van de kracht die nodig is voor het losmaken, wat van vitaal belang kan zijn bij het hanteren van delicate materialen.
Tests
Bij het uitvoeren van tests werd het transfersysteem aan een robotarm bevestigd. De onderzoekers toonden aan dat het een delicate glazen schijf van een hellend oppervlak kon oppakken, naar een andere locatie kon verplaatsen en voorzichtig kon neerzetten zonder enige schade aan te richten.
De onderzoekers verwachten dat hun onderzoek veel belangstelling zal wekken vanuit de industrie. Veel bedrijven zijn geïnteresseerd in het gebruik van droge lijmen voor tijdelijke bevestiging en verplaatsing van componenten, vooral in robottoepassingen. Het team hoopt een brug te kunnen slaan tussen onderzoek en de industrie door dit toe te passen op echte industriële toepassingen en door geavanceerdere modellen te ontwikkelen.
De wetenschappelijke publicatie vindt u hier.
Ill.: Kyungpook National University, Dong-A University