
30/11/2023
Door Ad Spijkers
In veel toepassingen kan robotica een alternatief voor dure bewerkingscentra worden. Dat vergt nog wel enig ontwikkelingswerk.
In vergelijking met bewerkingscentra zijn robots goedkoop in aanschaf en flexibel in meerdere bewegingsassen te programmeren. Maar als bijzondere precisie vereist is bij het bewerken, verbinden of vormen, moeten ze meestal passen. Onderzoekers van het nieuw opgerichte Applikationszentrums Bahngeführte Roboterbearbeitung bij het Fraunhofer Institut für Werkzeugmaschinen und Umformtechniek (IWU) in Chemnitz zijn bezig dit te veranderen. Tijdens de officiële opening op 5 december zullen ze in praktische demonstraties presenteren hoe intelligente bewakings- en besturingstechnologie en compensatiesystemen zorgen voor nauwkeurige bewerkingspaden.
Nauwkeurige robots?
Robots voeren al jaren taken uit die een hoge mate van herhaalbaarheid vereisen. Ook bij eentonige of ergonomisch ongunstige taken zijn ze de eerste keuze. Maar het vormgeven van een plaatwerkonderdeel voor voertuigen of vliegtuigen, het laserlassen van componenten van thermische zonnemodules waarbij afwijkingen van meer dan 50 µm onaanvaardbaar zijn, of het slijpen van een oppervlak met complexe geometrieën?
Wanneer ze met dergelijke taken worden geconfronteerd, denken veel gebruikers nauwelijks aan robots, waarvan de trajecten meestal te veel afwijkingen vertonen. Aan de andere kant is de aanschaf of exploitatie van walserijen en industriële bewerkingscentra meestal alleen zinvol bij de productie van grote hoeveelheden of als er hoge prijzen voor het product kunnen worden bereikt.
Een veelbelovend alternatief en tegelijkertijd een oplossing voor dit dilemma is om robots precieze bewegingen te 'leren' met behulp van specifieke gereedschappen. De onderzoekers in Chemnitz hebben veel methodologische kennis opgebouwd om nieuwe toepassingsgebieden voor robotica te ontsluiten. Deze kennis is nu gebundeld in het nieuwe toepassingscentrum en is beschikbaar voor geïnteresseerde productiebedrijven. Het instituut noemt enkele voorbeelden.
Slijpen en polijsten
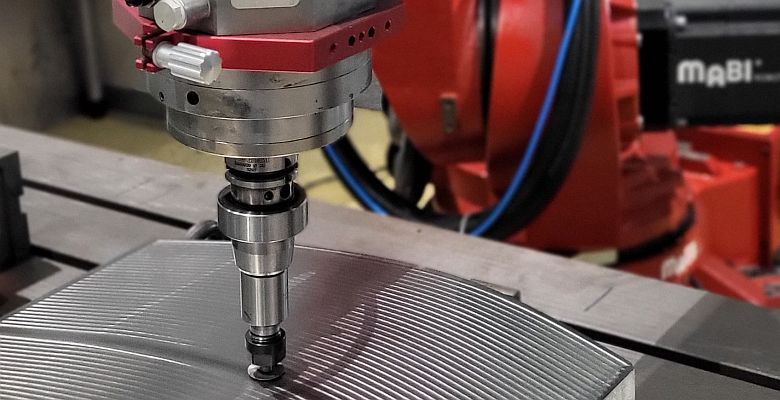
Om nieuwe gereedschappen (matrijzen) in te bouwen, moet een ervaren gereedschapsmaker slijpen en polijsten totdat de vereiste maatnauwkeurigheid van het onderdeel is bereikt. Robots maken de bewerking van vrije-vormoppervlakken mogelijk en kunnen nu een gedeeltelijke verlichting bieden voor dit complexe en arbeidsintensieve werk, waardoor tijd en geld worden bespaard. Dankzij een bij Fraunhofer IWU ontwikkelde compensatie-eenheid blijven de contactdruk en materiaalafname tijdens het slijpen constant en wordt de onnauwkeurigheid van het robotpad gecompenseerd.
Rolvormen
Bij rolvormen op basis van robots geleidt een robot een rollenpaar in meerdere passages, afwisselend in beide richtingen (omkeren) en met geleidelijk toenemende invoer langs het werkstuk totdat de gewenste vorm is bereikt. Eventuele afwijkingen in de geometrie kunnen na elke baanbeweging optisch of via de reactiekrachten in de robot worden gedetecteerd. Na een passende analyse van de meetgegevens kan elke afwijking bij de volgende vormbaanbeweging worden geëlimineerd (gecompenseerd). De terugvering van het materiaal kan worden gecorrigeerd door verder te buigen in de tegenovergestelde richting.
Het is belangrijk om het proces holistisch te bekijken, inclusief het passend flexibel vastklemmen van het te vormen onderdeel. Door procesbegeleidende dataverzameling en door AI ondersteunde evaluatie van de data kunnen fluctuerende materiaaleigenschappen (sterkte, terugvering) onmiddellijk worden aangepakt en geometrische afwijkingen vooraf worden gecompenseerd. Tegelijkertijd worden kwaliteitscontrole en documentatie een integraal onderdeel van het productieproces.
Laserlassen
Robotsystemen zijn door hun lagere nauwkeurigheid vaak niet geschikt voor uiterst nauwkeurig laserlassen. Deze onnauwkeurigheid kan worden gecompenseerd met naadvolgsystemen voor laserscanneroptiek. Als het laserstraalgereedschap wordt geleid door een robot en het te lassen werkstuk door een tweede robot, kunnen complexe 3D-geometrieën worden gelast (foto). De uitdaging is om twaalf robotassen en twee scannerassen zo te coördineren dat de resulterende laserstraalbeweging op het laspad constant en zeer nauwkeurig is.
Foto: Fraunhofer IWU