
17/12/2021
Door Ad Spijkers
Voor een robotgrijper met delicate kracht combineren onderzoekers kleefstoffen op basis van gekko-tenen met een aangepaste robothand.
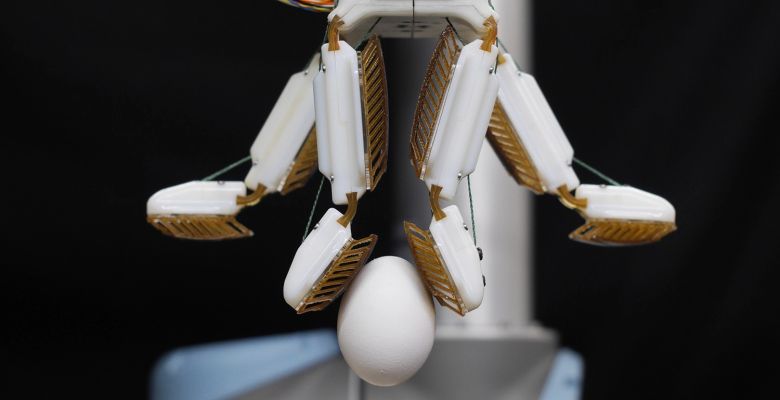
Onderzoekers aan Stanford University in Silicon Valley wilden manipulatoren creëren die tegelijkertijd handig en sterk zijn. Tijdens tests toonden ze aan dat hun FarmHand een breed scala aan items kan hanteren, waaronder rauwe eieren, druiventrossen, borden, flessen met vloeistof, basketballen en zelfs een haakse slijper.
Gekko-kleefstof
FarmHand profiteert van twee soorten biologische inspiratie. De vingers met meerdere gewrichten doen denken aan een menselijke hand. Ze zijn bedekt met gripvaste maar niet plakkerige kleefstoffen die zijn gebaseerd op de structuur van gekko-tenen en zijn ontwikkeld aan Stanford University.
Net als de tenen van een gekko zorgt de kleefstof voor een sterke grip via microscopisch kleine klepjes. Wanneer ze volledig in contact zijn met een oppervlak, creëren deze klepjes een Van der Waals-kracht. Hierdoor kan de kleefstof goed vasthouden, maar heeft weinig kracht nodig om dit te doen. Nog een bonus: ze voelen niet plakkerig aan en laten geen residu achter.
De eerste toepassingen van op gekko's gebaseerde kleefstof hadden te maken met het klimmen door robots of mensen of het grijpen van grote gladde objecten in de ruimte. Maar de onderzoekers hebben altijd in onze gedachten om de stof te gebruiken voor andere toepassingen. Het probleem is dat gekko-kleefstoffen kieskeurig blijken te zijn.
De clou is dat de gekko-kleefstoffen op een bepaalde manier moeten aansluiten op een oppervlak om de Van der Waals-kracht te activeren. Dit is gemakkelijk te controleren wanneer ze soepel op een plat oppervlak worden aangebracht. Maar het is veel moeilijker wanneer een greep berust op meerdere zelfklevende gekko-vlakken die onder verschillende hoeken contact maken met een object, zoals met FarmHand.
Knijpen en grijpen
Vingerkussentjes van FarmHand onder de kleefstof helpen om deze uitdaging aan te gaan. Ze zijn gemaakt van een opvouwbare ribstructuur die met weinig kracht knikt. Ongeacht de locatie of hoek van contact knikken de ribben consequent om gelijke krachten op de zelfklevende grijpvlakken te garanderen en te voorkomen dat een enkel vlak voortijdig wegglijdt.
Het bewegen van de ribben resulteert in het knikken in een vergelijkbare kracht. Het is een eenvoudig fysiek gedrag dat zelfs in ruimtes buiten robotica kan worden toegepast, misschien als loopvlak- of terreinbanden.
De pezen van de hand zijn ook cruciaal omdat ze een hyperextensie mogelijk maken. Veel robothanden en klemmen voorwerpen in een C-vorm, zoals iets oppakken met alleen de top van je vingers. De FarmHand vouwt zich om het te pakken voorwerp heen, wat de kleefstof meer werkoppervlak geeft.
Voortgang
Het ontwerp precies goed krijgen was vooral moeilijk omdat bestaande computersimulaties moeite hebben met het voorspellen van real world prestaties met zachte objecten - een andere factor in het probleem met biologische producten. Maar de onderzoekers profiteerden van de mogelijkheid om veel van de harde en zachte plastic componenten in hun grijper relatief snel in 3D te printen en te testen. Ze stellen zelfs dat het resultaat vijf jaar geleden misschien niet mogelijk zou zijn geweest of in ieder geval veel later.
Verdere verbeteringen aan FarmHand zouden feedbackfuncties kunnen zijn. Deze zouden gebruikers helpen begrijpen hoe de hand grijpt. De ontwikkelaars onderzoeken ook commerciële toepassingen voor hun werk.
Foto: Biomimetics and Dextrous Manipulation Lab, Stanford University