
09/12/2022
Door Ad Spijkers
Nieuw onderzoek moet leiden tot intelligente robotgrijpers met de eigenschappen van gekkovoeten.
Geen muur is te steil voor gekko's. Ze lopen ondersteboven over plafonds, hun fijne harige voetjes plakken beter dan welke lijm dan ook zonder sporen na te laten, en ze tarten de zwaartekracht. De voeten van gekko's zijn interessant voor onderzoekers uit de materiaalkunde en AI-onderzoek. Dit effect van de gekkovoeten wordt nu gebruikt in het gezamenlijke project GecKI voor de ontwikkeling van zuinige, auto-adaptieve en productonafhankelijke kleefpads voor robotgrijpsystemen.
AI en grijpers
Hoe kan het gebruik van kunstmatige intelligentie een zo veelzijdig en energetisch zuinig mogelijk robotgrijpsysteem creëren? Het moet een ontwikkelingssprong veroorzaken in het gebruik van intelligente, zelfregulerende en flexibel schaalbare handlingprocessen in zowel het MKB als grote bedrijven. Het Fraunhofer-Institut für Zerstörungsfreie Prüfverfahren (IZFP) in Saarbrücken, Innocise in dezelfde stad en Next. Robotics in Villingen-Schwenningen (in het Zwarte Woud) houden zich bezig met dit onderzoeks- en ontwikkelingstraject.
Het doel van het project is om methoden van kunstmatige intelligentie verder te ontwikkelen om een nieuw type sensorsysteem te ontwerpen. Dit moet de auto-adaptieve, door robots ondersteunde manipulatie van objecten met eigen objectherkenning mogelijk maken. De robotarm krijgt de mogelijkheid om te voelen welk product het is en past zich dienovereenkomstig aan.
Voorbeeld van de natuur
Vooral in flexibele en vaak wisselende productielijnen, maar ook in veeleisende omgevingen zoals cleanrooms en stofzuigers, zijn goedkope, hulpbronnen besparende robotgrijpsystemen vereist. Zogeheten adhesive pads die aan de robotarm worden bevestigd, moeten hiervoor worden uitgerust met intelligente sensoren. Vervolgens worden de pads onafhankelijk van het product in de productie gebruikt.
Het toepassingsgebied is groot en varieert van gevoelige objecten of oppervlakken tot zware lasten, glasvezel of autodeuren als slechts twee van de talloze voorbeelden. De voeten van de gekko hebben wenselijke eigenschappen en kunnen aanzienlijke lasten kunnen dragen. Ze gebruiken fysieke adhesie op basis van intermoleculaire van der Waals-krachten. Ze rennen en klimmen zonder sporen achter te laten.
Het onderzoeksproject maakt de innovatieve adhesiegrijpers van Innocise intelligent. Bovendien moeten de informatie en gegevens die uit deze sensorintelligentie worden verkregen, worden omgezet in auto-adaptieve bewegingssequenties door een besturingsintelligentie in de robot. Een ander voordeel in een tijd van drastische energiebesparingen is, dat de adhesiegrijpers geen externe energievoorziening nodig hebben, bijvoorbeeld een vacuüm- of magneetgrijper. Dit breidt de toepassingsmogelijkheden op modulaire productielijnen uit.
De integratie van de pads in industriële systemen zou het 'plug and play' principe kunnen volgen. Hun verspreiding kan de energie-efficiëntie van productiegerelateerde verwerkingsprocessen aanzienlijk verbeteren.
Eerste mijlpaal
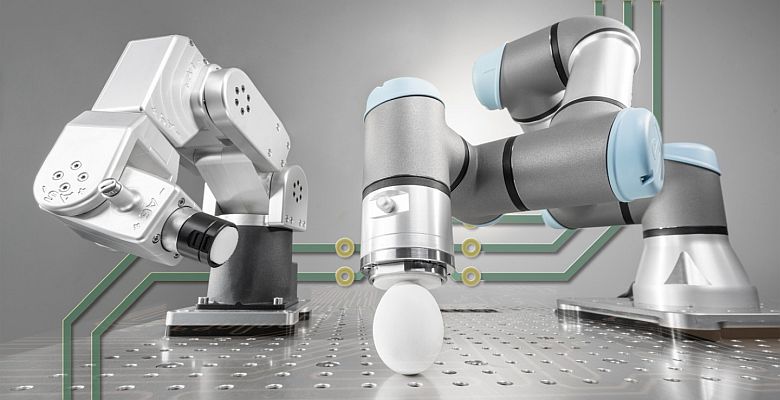
Een eerste belangrijke mijlpaal werd bereikt met het ontwerp van een testopstelling. Met behulp van deze demonstrator kunnen de onderzoekers het door robots ondersteunde grijpcontact en zijn structuren visualiseren. Ze hebben de eerste prototypes met sensortechnologie ontwikkeld die de bio-geïnspireerde grijpers kunnen leren voelen.
Het onderzoeksproject 'GecKI' moet bijdragen aan een significante verhoging van de winstgevendheid van flexibele en veranderende producties. De bedoeling is dat Duitsland als vestigingsplaats concurrerend blijft en een leidende rol speelt op het gebied van technologische innovaties voor flexibele productietechnieken.
Foto: Next. Robotics, Innocise