
07/06/2022
Door Ad Spijkers
Met nieuwe automatiseringstechnologie kunnen industriële robots werk visueel classificeren en autonoom taken uitvoeren.
Het Southwest Research Institute (SwRI) in San Antonio (Texas) ontwikkelt nieuwe beeldverwerkingstools voor robotica om de oppervlaktevoorbereiding van vliegtuigen te automatiseren. De robots kunnen oppervlakken op vliegtuigen en andere machines autonoom scannen, schuren en voorbereiden. De technologie kan worden toegepast op slijpen, schilderen, polijsten, reinigen, lassen, afdichten en andere industriële processen.
De technologie verhoogt de herhaalbaarheid van processen, verbetert de kwaliteit van onderdelen en vermindert herbewerkingen. Ze vermindert ook de blootstelling van mensen aan gevaarlijke stoffen en on-ergonomische omgevingen.
Machine learning
Het systeem maakt gebruik van door SwRI ontwikkelde algoritmen voor machine learning en classificatiesoftware. Ze kunnen samenwerken met open-source tools zoals Scan-N-PlanTM en ROS 2, de nieuwste versie van het open-source robotbesturingssysteem.
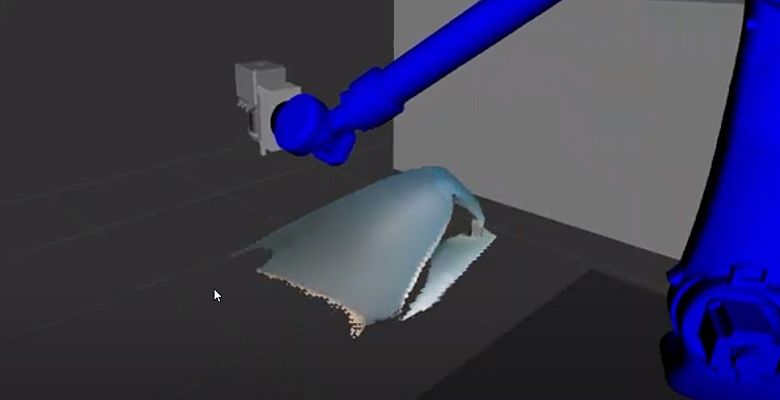
Scan-N-Plan, een ROS-Industrial-technologie, gebruikt machine vision om onderdelen te scannen en creëert 3D-meshgegevens. Robots gebruiken deze om gereedschapspaden en procestrajecten te plannen terwijl ze real-time procesbewaking uitvoeren. SwRI werkt nauw samen met het ROS-I-project om zijn softwarerepository te onderhouden en open source automatiseringsoplossingen uit te breiden.
Door gebruik te maken van deze open source tools met de aangepaste software, hebben de ontwikkelaars in San Antonio een oplossing ontwikkeld die op intelligente wijze regio's en texturen van onderdeeloppervlakken in verschillende stadia van het werk classificeert.
Machine vision
De oplossing omvat aangepaste algoritmen voor machine vision waarmee robots verschillende media kunnen toepassen. Dat kan met variërende druk op basis van de hoeveelheid oppervlaktewerk die nodig is. Op functies gebaseerde verwerking wordt ook mogelijk gemaakt door toevoegingen die gebruikmaken van semantische segmentatiebenaderingen. Hiermee is het juiste gereedschap op het juiste kenmerk toe te passen, bijvoorbeeld snijden versus schuren. SwRI spreekt over doorbraken die zullen helpen voorkomen dat robots metalen oppervlakken te veel schuren of slijpen.
Het project demonstreert de geavanceerde functies van ROS 2 en biedt tegelijkertijd een eerste raamwerk voor het uitbouwen van aanvullende applicaties. Het is ook een open source-voorbeeld voor het onderwijzen en trainen van diegenen die geïnteresseerd zijn in het ontwikkelen van geavanceerde oplossingen die gebruikmaken van ROS.
SwRI biedt hiermee beproefde oplossingen die gebruikmaken van dit raamwerk voor bedrijfsleven en overheid. De technologie is geschikt voor een breed scala aan toepassingen, voor zowel stationaire op cellen gebaseerde systemen als mobiele oplossingen.
Foto: SwRI