
03/06/2024
Door Ad Spijkers
De grijper is ontworpen voor het veelzijdig en nauwkeurig grijpen en manipuleren van objecten.
Onderzoekers aan de Shanghai Jiao Tong University hebben een nieuwe hybride aangedreven origami-grijper onthuld. Deze is ontworpen om de uitdaging van het grijpen en manipuleren van objecten met ongekende veelzijdigheid en precisie aan te pakken. De grijper belooft de mogelijkheden van robotsystemen in sectoren variërend van productie tot gezondheidszorg opnieuw vorm te geven.
Origami
De nieuw ontwikkelde grijper maakt gebruik van een combinatie van pneumatische en kabelgestuurde mechanismen. Deze besturen een door origami geïnspireerde structuur, wat zorgt voor instelbare vingerstijfheid en variabele vingerlengtes. Door dit kan de grijper een breed scala aan objecten te hanteren. Hij kan zijn fysieke kenmerken aanpassen aan de taak die voorhanden is - een stap vooruit op het gebied van zachte robotica.
Traditionele robotgrijpers zijn vaak beperkt door hun stijve constructie en gebrek aan aanpassingsvermogen. Ze kunnen moeite hebben met taken die delicate behandeling of complexe manoeuvres vereisen. De origamigrijper daarentegen haalt inspiratie uit de biologische flexibiliteit en zachtheid die te zien zijn in natuurlijke organismen.
De vingers zijn gemaakt uit een met thermoplastische urethaan gecoate stof en discrete dunne metalen platen. Ze combineren de flexibiliteit van zachte materialen met de precisie en sterkte van stijve componenten. Hierdoor kan de grijper zich aanpassen aan de oppervlakken waarmee hij in wisselwerking staat. Hierdoor wordt zijn vermogen om verschillende materialen veilig vast te pakken zonder schade te veroorzaken, verbeterd.
Aanpassing
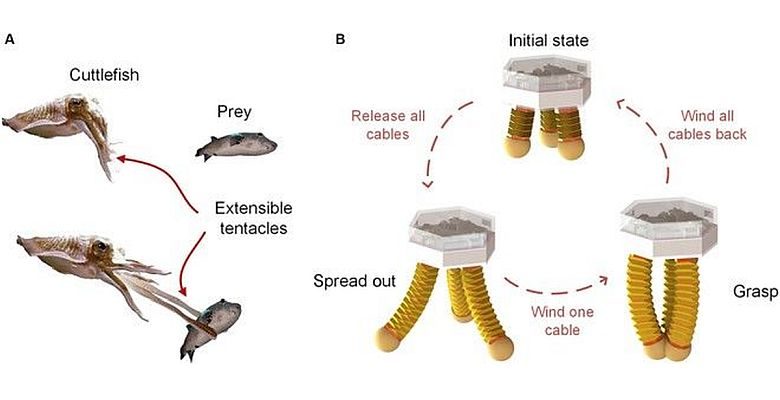
Een van de belangrijkste innovaties van de origamigrijper is, dat hij de lengte en stijfheid van zijn vingers dynamisch kan aanpassen. Dit kan door de lengtes van de kabels en de invoerdruk van het pneumatische systeem aan te passen. Hierdoor kan de grijper zijn greep veranderen om objecten van verschillende groottes en gewichten te kunnen hanteren. Deze functie is met name handig in scenario's waarin verschillende objecten sequentieel moeten worden gehanteerd of in omgevingen waar ruimte en aanpassingsvermogen cruciaal zijn.
Het ontwerp van de grijper omvat drie onafhankelijk bestuurde kabels voor elke vinger. Deze kunnen synchroon trekken voor een uniforme beweging of differentieel voor complexe, multidirectionele bewegingen. Dit niveau van controle is essentieel voor taken die fijne manipulatiemogelijkheden vereisen. Hierbij kunt u denken aan het monteren van delicate componenten of het navigeren door rommelige of oneffen oppervlakken.
Het onderzoeksteam heeft uitgebreide tests uitgevoerd om de functionaliteit van de grijper te demonstreren. Experimenten toonden aan dat de grijper zijn grijpkracht en vingerconfiguratie effectief kon aanpassen om objecten te hanteren die varieerden van dunne stukken stof tot voetballen. Deze veelzijdigheid wordt ondersteund door het innovatieve pneumatische-kabelhybridesysteem van de grijper, dat zowel de kracht levert die nodig is om zwaardere lasten te hanteren als de zachte aanraking die nodig is voor fragielere items.
Ontwikkeling
De onderzoekers willen het ontwerp van de grijper verder verfijnen om de draagkracht te verbeteren en de energie-efficiëntie te verhogen. Dergelijke verbeteringen zouden de toepassingen van de grijper kunnen verbreden. Hierdoor kan de grijper een waardevol hulpmiddel worden voor industrieën waar handmatige behendigheid en delicate behandeling van het grootste belang zijn. Voorbeelden zijn chirurgische omgevingen of de ingewikkelde assemblage van consumentenelektronica.
Deze ontwikkeling betekent een stap voorwaarts in de voortdurende integratie van zachte robotica in industriële en commerciële toepassingen. Naarmate de roboticatechnologie zich blijft ontwikkelen, zijn apparaten zoals de origamigrijper klaar om een cruciale rol te spelen bij het mogelijk maken van efficiëntere, veiligere en veelzijdigere geautomatiseerde systemen.
De wetenschappelijke publicatie vindt u hier.
Ill.: Zhuang Zhang, Shanghai Jiao Tong University