
24/01/2022
Door Ad Spijkers
ETH-onderzoekers ontwikkelen een nieuw besturingssysteem waarmee de lopende robot Anymal zich snel en robuust kan bewegen in moeilijk terrein.
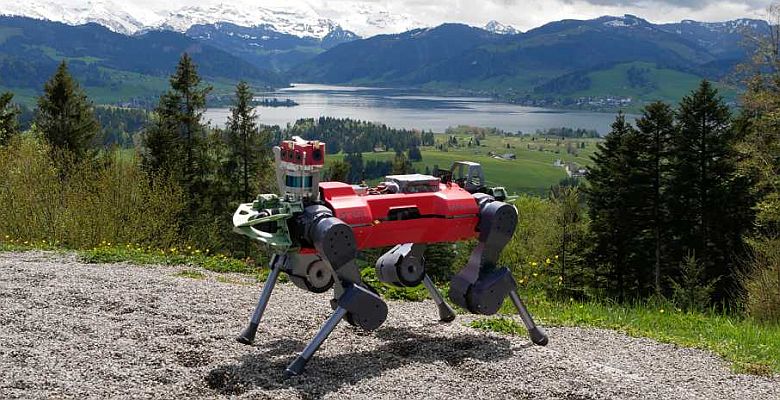
Steile passages op glibberige grond, hoge trappen, puin en bospaden met wortels. Het pad naar de 1098 m hoge Etzel aan de zuidkant van het Meer van Zürich is bezaaid met tal van obstakels. Maar Anymal, de vierbenige looprobot van de Eidgenössische Technische Hochschule Zürich (ETH), overwint gemakkelijk het 120 m hoogteverschil. Hij is op de top na een klim van 31 minuten, vier minuten sneller dan voor menselijke wandelaars. En dat zonder te vallen of fouten te maken.
Besturingstechnologie
Dit wordt mogelijk gemaakt door een nieuwe besturingstechnologie die onderzoekers van ETHZ hebben ontwikkeld. De robot heeft geleerd visuele waarneming van de omgeving te combineren met tactiele waarneming op basis van direct beencontact. Daardoor kan hij ruwer terrein sneller, efficiënter en vooral robuuster aan. In de toekomst kan Anymal overal worden gebruikt waar het te gevaarlijk is voor mensen of te onbegaanbaar voor andere robots.
Om zich op moeilijk terrein te kunnen verplaatsen, combineren mens en dier automatisch de visuele waarneming van hun omgeving met de tastzin van hun benen en handen. Dit betekent dat ze gemakkelijk kunnen omgaan met gladde of zachte oppervlakken en betrouwbaar kunnen bewegen, zelfs bij slecht zicht. Tot nu toe hebben lopende robots dit slechts in beperkte mate kunnen doen.
De reden hiervoor is dat de informatie over de directe omgeving die wordt vastgelegd door lasersensoren en camera's vaak onvolledig en dubbelzinnig is. Hoog gras, ondiepe plassen of sneeuw verschijnen bijvoorbeeld als onoverkomelijke obstakels of zijn gedeeltelijk onzichtbaar, hoewel de robot er wel overheen zou kunnen lopen. Daarnaast kan het zicht van de robot verstoord worden door moeilijke lichtomstandigheden, stof of mist.
Robots zoals Anymal moeten daarom zelf kunnen beslissen wanneer ze beelden van hun omgeving kunnen vertrouwen en snel kunnen handelen, en wanneer ze voorzichtig en met kleine stapjes te werk gaan. Daar ligt voor onderzoekers de grote uitdaging.
Virtueel trainingskamp
De viervoetige Anymal robot is ontwikkeld door ETH-onderzoekers en wordt gecommercialiseerd door de ETH-spin-off Anybotics. Dankzij een nieuw besturingssysteem op basis van een neuraal netwerk kan de lopende robot nu externe en tactiele waarneming combineren.
Voordat de robot zijn capaciteiten in de natuur kon bewijzen, confronteerden de wetenschappers het systeem in een virtueel trainingskamp met tal van obstakels en foutenbronnen. Hierdoor leerde het netwerk hoe de robot obstakels optimaal overwint en wanneer hij omgevingsdata kan vertrouwen of beter negeren.
Door deze training kan de robot het moeilijkste terrein in de natuur de baas worden zonder het van tevoren te hebben gezien. Het werkt zelfs wanneer de sensorgegevens in de directe omgeving dubbelzinnig of diffuus zijn. Anymal speelt dan op veilig en vertrouwt op zijn tastzin. Volgens Hutter combineert de robot het beste van twee werelden: de snelheid en efficiëntie van externe waarneming en de zekerheid van tactiele waarneming.
Extreme omstandigheden
Of het nu na een aardbeving, na een nucleaire ramp of tijdens een bosbrand is: robots zoals Anymal kunnen worden gebruikt waar het te gevaarlijk is voor mensen en waar andere robots vanwege het moeilijke terrein niet meer kunnen worden gebruikt.
Anymal kon eind vorig jaar tijdens de Darpa Subterranean Challenge robotcompetitie bewijzen hoe goed de nieuwe besturingstechnologie werkt. De ETH-robot overwon snel en automatisch tal van obstakels en moeilijk terrein in een smal, ondergronds tunnel- en grottenstelsel. Dit leverde een belangrijke bijdrage aan de eerste plaats van ETH-onderzoekers als onderdeel van Team Cerberus en het winnen van een prijzengeld van 2 miljoen dollar.
Foto: Takahiro Miki