
09/05/2023
Door Ad Spijkers
Bistabiliteit en instabiliteit om opgeslagen energie in bistabiele structuren snel vrij te geven, zou de robotprestaties op verschillende gebieden kunnen verbeteren.
Bistabiele structuren in de natuur zijn ongeëvenaard vanwege hun snelle respons en krachtversterking, zelfs bij de kleinste fysieke stimulatie. Het benutten van bistabiliteit en instabiliteit om de opgeslagen energie in deze structuren snel vrij te geven, zou de robotprestaties op verschillende gebieden kunnen verbeteren. Voor robots zouden bijvoorbeeld voortbeweging met hoge snelheid, adaptieve detectie en snel grijpen mogelijk zijn. Het huidige onderzoek aan bistabiele structuren richt zich echter voornamelijk op hun stabiele toestanden. Tussenliggende toestanden met een groot aantal afstembare energiebarrières ontbreken in de huidige studies.
Bistabiele structuur
Onlangs heeft een onderzoeksteam aan het Shenzhen Institute of Advanced Technology (SIAT) van de Chinese Academy of Sciences een ultra-afstembare bistabiele structuur voorgesteld met programmeerbare energiebarrières en triggerkrachten van ordes van grootte verschillen. De structuren kunnen ook worden aangepast met gevarieerde geometrische configuraties, afmetingen, materialen en bedieningsmethoden voor verschillende robottoepassingen.
De gerapporteerde bistabiele structuur werd vervaardigd door een plaatmateriaal tot een specifiek vouwpatroon te vouwen. Het bezit een stabiele toestand, een metastabiele toestand en veel tussenliggende toestanden. Wanneer de bistabiele structuur overgaat van zijn metastabiele toestand naar de stabiele toestand, bestaat er een kritiek punt waarop de opgeslagen spanningsenergie zijn maximale waarde bereikt en de snelle verandering begint.
In het Chinese onderzoek werden de tussentoestanden met programmeerbare energiebarrières beschreven voordat de bistabiele structuur zijn kritieke punt bereikt.
Triggerkrachten
Door de structuur van de metastabiele toestand naar een tussenliggende toestand te om te vormen, neemt de energiebarrière af. Dat betekent dat kleinere externe stimulaties nodig zijn om een snelle verandering van de bistabiele structuren te activeren. Naarmate de energiebarrière steeds kleiner wordt, wordt de vereiste externe stimulatie steeds delicater. Zo bereikten de onderzoekers een groot aantal instelbare triggerkrachten voor de voorgestelde bestuurbare bistabiele structuur.
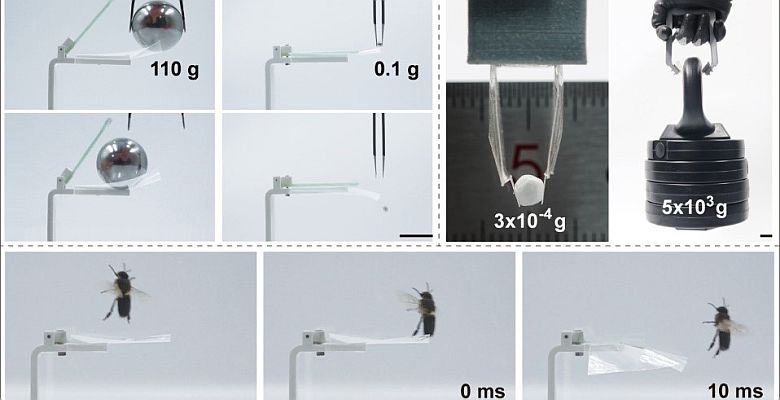
Om de afstembaarheid van de voorgestelde structuur aan te tonen, voerden de onderzoekers een reeks experimenten uit. Ze toonden aan dat de triggerkracht van een enkele structuur kon worden afgestemd op 0,1% van de maximale waarde, terwijl het opgeheven gewichtsverschil 107 keer groter was. Dit gebeurde met behulp van grijpers, vervaardigd door de voorgestelde structuren met verschillende ontwerpparameters.
Ze kunnen de structuur afstemmen op een ultragevoelige toestand, zodat deze reageert op een minieme stimulatie zo zacht als de aanraking van een vliegende bij. Maar ze kunnen de structuur ook in een ongevoelige toestand brengen zodat zelfs een stalen bal van 110 g zijn energiebarrière niet zou kunnen doorbreken.
Voorbeelden
Om de mogelijkheden van de structuur in diverse toepassingen te valideren, werden verschillende prototypes ontwikkeld, waaronder een vliegenvanger, grijpers, een springer, een zwemmer, een thermische schakelaar en een sorteersysteem. De prototypes laten zien dat de robotachtige vliegenval met een gevoelige 'stamper' kan worden geactiveerd door fysieke stimulatie in 10 ms. De bistabiele vanger kan een tafeltennisbal met hoge snelheid (10 m/s) vangen. De minimale springer bereikt een hoogte van meer dan 24 keer de lichaamslengte, enzovoorts.
Het onderzoek zou de grenzen van bistabiel structuurontwerp kunnen verbreden en een weg kunnen banen naar toekomstige ontwerpen in robotica, biomedische engineering, architectuur en kinetische kunst.
De wetenschappelijke publicatie vindt u hier.
Foto: Li Yingtian, SIAT