
25/09/2023
Door Ad Spijkers
Onderzoekers creëren data vanuit een menselijk model om de toestand van zorgrobotgebruikers in te schatten.
Een onderzoeksteam aan de Toyohashi University of Technology in Japan heeft een techniek ontwikkeld om trainingsdata te genereren voor robots die werken op basis van schattingen van de toestand van de gebruiker met behulp van machine learning. Tot op heden zijn enkele methoden gebaseerd op machine learning voorgesteld om de toestand van robotgebruikers te schatten met behulp van mogelijke punten voor de positie van het zwaartepunt.
Voor dergelijk leren zijn echter trainingsdata nodig die overeenkomen met het moment waarop de robot wordt gebruikt om bewegingen te ondersteunen. Het onderzoeksteam in Toyohashi (90 km zuidoostelijk van Nagoya) ontwikkelde een nieuwe methode om trainingsdata te creëren. Ze maken gebruik van een menselijk lichaamslinkmodel zonder de noodzaak om de bewegingen te analyseren.
Details
Ouderen met verzwakte spieren hebben vaak hulp nodig in hun dagelijks leven. Robots moeten vaak automatisch ondersteunende acties uitvoeren om de last voor menselijke zorgverleners te verminderen. Dit kenmerk van robots vereist het inschatten van de toestand in termen van de houding van de ouderen die de robot gebruiken. De robots moeten passende ondersteuning bieden voor hun toestand. Gelukkig vordert de ontwikkeling van robots die veel voorkomende taken zoals opstaan en lopen ondersteunen.
Het Japanse onderzoeksteam heeft een methode voorgesteld om de mogelijke posities van het zwaartepunt van de robotgebruiker te berekenen en de toestand te schatten met behulp van machine learning. Bij deze methode is het noodzakelijk om de bewegingen van de gebruiker te verzamelen als trainingsdata tijdens het gebruik van de robot. Met name het verkrijgen van de data in abnormale toestanden (zoals houdingen waarin de gebruiker waarschijnlijk zal vallen tijdens het lopen) kan inspannend zijn voor ouderen die zich in deze abnormale toestanden bevinden.
Trainingsdata
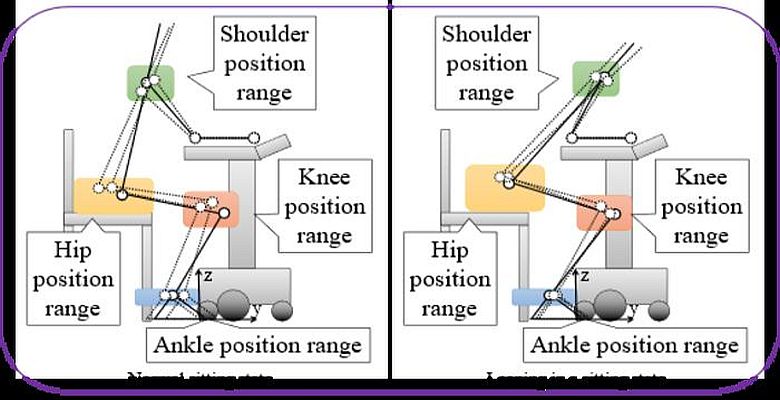
Het onderzoeksteam ontwikkelde een methode voor het creëren van trainingsdata voor mogelijke posities van het zwaartepunt door gebruik te maken van een menselijk lichaamslinkmodel zonder de noodzaak om bewegingen te meten. Het gaat om een eenvoudig model dat het menselijk lichaam voorstelt met stijve verbindingen en roterende gewrichten. Dit model kan worden gebruikt om menselijke posities in elke toestand, zoals zitten, staan en abnormale toestanden, te simuleren en aldus trainingsdata te creëren. De illustratie toont het model bij zitten (links) en voorover buigen.
Experimenten hebben bevestigd dat de zorgrobots kunnen leren op basis van de trainingsdata die met deze methode worden gegenereerd. Ze kunnen de toestand van de gebruiker inschatten en staande, lopende en zittende acties ondersteunen.
Toekomst
Het onderzoeksteam verwacht dat de ontwikkelde methode voor het creëren van trainingsdata, gebaseerd op het Human Body Link-model, kan worden toegepast op zorgrobots van verschillende vormen en voor verschillende doeleinden. Bovendien kan het worden toegepast op industriële en communicatierobots, waarbij operaties op basis van positieschattingen van personen vereist zijn.
In de toekomst wil het onderzoeksteam een systeem creëren dat veiliger en gemakkelijker te gebruiken is. Dit willen ze doen door een op interferentie gebaseerde robot te ontwikkelen die de noodzakelijke informatie aan de gebruiker kan presenteren, voor effectieve communicatie tussen mens en robot.
De wetenschappelijke publicatie vindt u hier.
Ill.: Toyohashi University of Technology