
05/05/2023
Door Ad Spijkers
Studie laat een andere manier zien om programmeerbare actieve materie te realiseren.
De miniaturisering gaat op alle gebieden door en ook de robottechnologie beweegt zich naar steeds kleinere eenheden. In de toekomst zouden kleine robots bijvoorbeeld medicijnen kunnen transporteren naar de delen van het lichaam waar ze direct nodig zijn in de medisch-farmaceutische sector. De basis voor dergelijke technieken wordt ook in de natuurkunde gelegd.
De Johannes Gutenberg Universität Mainz (JGU) heeft gewerkt aan een nieuwe aanpak waarbij een collectief van minirobots werd onderzocht en hun gedrag werd geanalyseerd. De theoretische basis hiervoor wordt geleverd door kennis over zwermvorming. De resultaten wijzen op een andere manier waarop programmeerbare materie kan worden gerealiseerd.
Robotcollectief
Om taken op micro- en nanostructuurniveau te vervullen, zoekt de wetenschap naar nieuwe manieren. Dit gebeurt vooral omdat verdere miniaturisering van apparaten of componenten tegen zijn grenzen aanloopt. Een nieuw principe zou zijn om, in plaats van een taak toe te vertrouwen aan één robot, er een heel collectief aan toe te wijzen. Gezien zijn grootte heeft een enkele minirobot slechts beperkte mogelijkheden om een taak uit te voeren. Maar een collectief van samenwerkende robots zou deze taak misschien heel goed aankunnen.
Hier komt de statistische fysica om de hoek kijken, die modellen gebruikt om het gedrag van actieve deeltjes te beschrijven – vergelijkbaar met het gedrag van zwermen vogels. Daartoe onderzocht het team wetenschappers het collectieve gedrag van kleine, commercieel verkrijgbare robots. Deze 'wandelaars' worden aangedreven door trillingen, die hen voortbewegen op twee rijen poten.
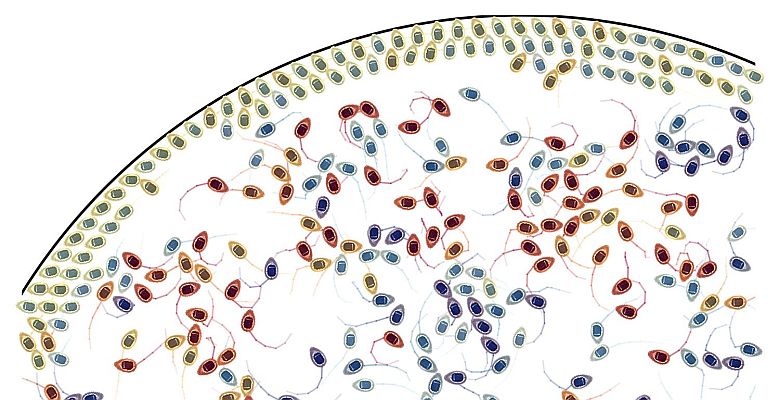
Omdat de lengte, vorm en stijfheid van de benen enigszins variëren van robot tot robot, vindt beweging plaats in cirkelvormige paden met een karakteristieke straal die specifiek is voor elk rollend object. De robots, die qua uiterlijk en beweging doen denken aan kleine kevers, hebben een elliptische vorm en richten zich bij contact op elkaar, net als botsauto's. Het doel was om het collectieve gedrag te onderzoeken en te beschrijven en daarmee het mogelijke voordeel te bepalen. Maar als natuurkundigen zijn de onderzoekers in eerste instantie geïnteresseerd in de verschijnselen zelf.
Het onderzoeksteam merkte twee effecten op die optreden als de robots iets andere benen hebben, namelijk dat de groep een grotere diversiteit vertoont. Ten eerste hebben de wandelaars minder tijd nodig om de kamer te verkennen, dus waren ze sneller. Ten tweede sorteren ze zichzelf wanneer ze door een muur worden omsloten. Afhankelijk van hun bewegingsbereik blijven de minirobots aan de muur plakken of verzamelen ze zich naar binnen.
Inzicht in collectief gedrag
Dit gedrag kan worden uitgebuit, bijvoorbeeld als de robots vracht moeten vervoeren en voor dit doel met de vracht moeten communiceren. Dan zou de snelheid waarmee ze de ruimte verkennen toenemen en zou de vracht daardoor sneller afgeleverd kunnen worden. Statistische fysica kan nieuwe inzichten geven in de effecten die een collectief van robots kan benutten.
De zogenaamde actieve materie beïnvloedt veel gebieden van de levende en levenloze wereld waarin collectief gedrag of collectieve bewegingen plaatsvinden, bijvoorbeeld het gedrag van zwermen vogels. De onderzoekers passen het theoretische begrip van hoe zwermvorming werkt toe op robotsystemen.
Het onderzoek werd uitgevoerd in een samenwerking tussen JGU, TU Darmstadt en het Max Planck Institut für Polymerforschung in Mainz. De nu gepresenteerde studie is enerzijds gebaseerd op experimenten, anderzijds werd er gemodelleerd op JGU's krachtige Mogon II computer.
De wetenschappelijke publicatie vindt u hier.
Foto: Frank Siebers, JGU