
05/12/2023
Door Ad Spijkers
Engelse onderzoekers ontwikkelden een inspectiemethode en -procedure waarmee mobiele robots grote pijpconstructies kunnen inspecteren.
Een team onderzoekers aan de University of Bristol ontwikkelde een aanpak om een lange stalen buis met meerdere defecten te beoordelen. Hierbij kunt u denken aan ronde gaten met verschillende afmetingen, een scheurachtig defect en putten. Dit doen ze via een ontworpen inspectiepad om 100% detectiedekking te bereiken voor een gedefinieerd referentiedefect. De technologie is gedemonstreerd met de succesvolle inspectie van meerdere defecten aan een 3 m lange stalen pijp met behulp van geleide akoestische golfsensoren.
Akoestische sensoren
Geautomatiseerde inspectie van pijpleidingen van binnenuit is niet nieuw. Beheerders van pijpleidingen kunnen inspecties uitvoeren zonder de productstroom in de pijpleiding te stoppen. Daarvoor zijn robotsystemen met geïntegreerde ultrasone sensoren beschikbaar. De beschikbare systemen hebben echter moeite met het omgaan met variërende leidingdoorsneden of netwerkcomplexiteit. Dit leidt onvermijdelijk tot verstoring van de pijpleiding tijdens inspecties. Dit maakt ze geschikt voor specifieke inspecties van hoogwaardige activa, zoals olie- en gaspijpleidingen, maar niet algemeen toepasbaar.
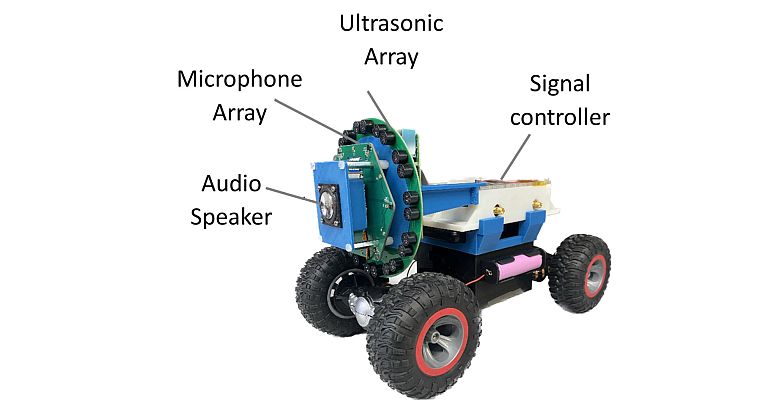
De onderzoekers hebben aangetoond hoe ze grote plaatachtige structuren effectief konden onderzoeken met behulp van een netwerk van onafhankelijke robots. Deze dragen elk sensoren die geleide akoestische golven kunnen verzenden en ontvangen, werkend in puls- echo-modus.
Deze aanpak heeft het voordeel dat de communicatie tussen robots wordt geminimaliseerd. De methode vereist geen synchronisatie en vergroot de mogelijkheid van verwerking aan boord. Dit verlaagt de kosten van data-overdracht en daarmee de totale inspectiekosten. De inspectie bestond uit een fase van defectdetectie en een fase van defectlokalisatie.
Robotnetwerken
Nu de kosten van mobiele robots de afgelopen jaren zijn gedaald, is het steeds beter mogelijk om meerdere robots in te zetten voor een inspectie van een groot gebied. De onderzoekers in Bristol namen het bestaan van kleine inspectierobots als uitgangspunt en onderzochten hoe deze kunnen worden gebruikt voor generieke bewaking van een constructie. Dit vereist inspectiestrategieën, methodologieën en beoordelingsprocedures die kunnen worden geïntegreerd met de mobiele robots voor nauwkeurige detectie en lokalisatie van defecten, efficiënt en tegen lage kosten.
De wetenschappers onderzoeken dit probleem door een netwerk van robots te beschouwen, elk met een enkele omnidirectionele geleide akoestische golftransducer. Deze configuratie werd overwogen omdat deze misschien wel de eenvoudigste is, met goede mogelijkheden voor integratie in een goedkoop platform. De gebruikte methoden zijn algemeen toepasbaar op andere gerelateerde scenario's en maken het mogelijk om de impact van beslissingen over detectie- of lokalisatiemethoden snel te kwantificeren.
De methoden kunnen worden gebruikt voor andere materialen, pijpgeometrieën, geluidsniveaus of geleide golfmodussen. Hierdoor kan het volledige scala aan sensorparameters, defectgroottes en -types en bedieningsmodaliteiten worden onderzocht. Ook kunnen de technieken worden gebruikt om de detectie- en lokalisatieprestaties voor gespecificeerde inspectieparameters te beoordelen, bijvoorbeeld het voorspellen van het minimaal detecteerbare defect onder een gespecificeerde detectiekans en waarschijnlijkheid van vals alarm. Het team gaat nu samenwerkingsmogelijkheden met industrieën onderzoeken om de huidige prototypes voor daadwerkelijke pijpinspecties te verbeteren.
De wetenschappelijke publicatie vindt u hier.
Ill.: Dr Jie Zhang, University of Bristol