
05/05/2023
Door Ad Spijkers
Met hun vele poten kunnen de geleedpotigen elk terrein doorkruisen zonder te stoppen. Dat moeten robots ook kunnen.
De wereld van een duizendpoot is heel anders dan onze wereld. De beweging van de mens wordt grotendeels gedomineerd door inertie. Wie met zijn been zwaait, landt op zijn voet en gaat vooruit. Als duizendpoten stoppen met hun lichaamsdelen en ledematen te wiebelen, stoppen ze onmiddellijk met bewegen.
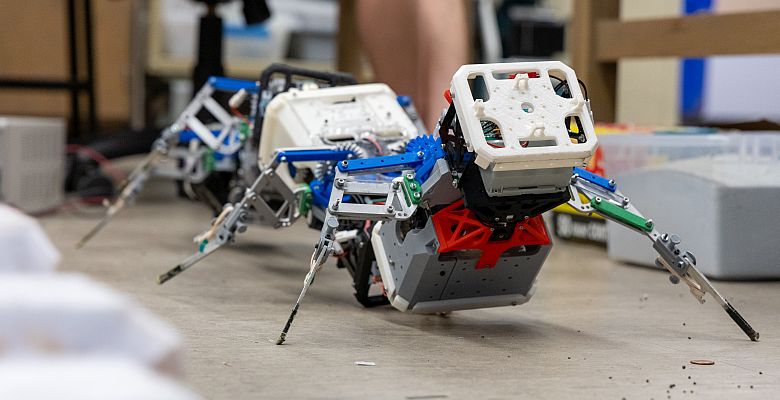
Onderzoekers van het Georgia Institute of Technology in Atlanta gebruiken deze bewegingsstijl in hun voordeel. Ze waren geïntrigeerd om te zien of de vele ledematen nuttig zouden kunnen zijn voor voortbeweging in onze wereld. Ze ontwikkelden een nieuwe theorie van meerbenige voortbeweging en creëerden veelpotige robotmodellen.
Ze ontdekten dat een robot met overtollige benen over ongelijke oppervlakken kan bewegen zonder enige aanvullende detectie- of besturingstechnologie – zoals de theorie voorspelde. Deze robots kunnen over complex, hobbelig terrein bewegen. Daarmee is er potentieel om ze te gebruiken voor landbouw, ruimteverkenning en zoek- en reddingsacties.
Een been omhoog
De onderzoekers werden gemotiveerd door de communicatietheorie van wiskundige Claude Shannon. Deze laat zien hoe op betrouwbare wijze signalen over afstand kunnen worden verzonden. Deze theorie suggereert dat een manier om ervoor te zorgen dat een bericht van punt A naar punt B komt op een lijn met veel ruis, niet is door het als een analoog signaal te verzenden. Het is beter het signaal op te splitsen in afzonderlijke digitale eenheden en deze eenheden te herhalen met een geschikte code.
De onderzoekers werden geïnspireerd door deze theorie en probeerden of redundantie nuttig zou kunnen zijn bij het transport van materie. Ze begonnen het project om te zien wat er zou gebeuren met meer poten op de robot: vier, zes, acht poten en zelfs zestien poten. De wetenschappers ontwikkelden een theorie die voorstelt dat het toevoegen van beenparen aan de robot zijn vermogen vergroot om robuust over uitdagende oppervlakken te bewegen.
Dit concept van ruimtelijke redundantie zorgt er voor dat de benen van de robot op zichzelf succesvol zijn zonder dat sensoren nodig zijn om de omgeving te interpreteren. Als een been hapert, houdt de overvloed aan benen de robot hoe dan ook in beweging. In feite wordt de robot een betrouwbaar systeem om zichzelf en zelfs een lading van A naar B te vervoeren op moeilijke landschappen.
Zonder sensoren
Met een geavanceerde tweevoetige robot zijn doorgaans veel sensoren nodig om deze in real-time te besturen. Maar bij zoek- en reddingsacties, het verkennen van Mars of microrobots is er behoefte aan een robot met beperkte waarneming. Daar zijn veel redenen voor. Sensoren kunnen duur en kwetsbaar zijn, of de omgevingen kunnen zo snel veranderen dat de responstijd van de sensor-controller onvoldoende is.
Om dit te testen, is een reeks experimenten uit op verschillende terreinen om een inconsistente natuurlijke omgeving na te bootsen. Ze testten de robot door het aantal poten steeds met twee te verhogen van zes tot zestien. Naarmate het aantal poten toenam, kon de robot behendiger over het terrein bewegen, zelfs zonder sensoren. Uiteindelijk testten ze de robot op echt terrein in de open lucht, waar hij in verschillende omgevingen kon bewegen. De meerbenige robot kan daar taken uitvoeren met open kringloop besturing.
Volgende stappen
De onderzoekers passen hun ontdekkingen al toe op de landbouw. Er is al een bedrijf opgericht dat ernaar streeft deze robots te gebruiken om landbouwgrond te wieden waar onkruidverdelgers niet effectief zijn. Ook willen de onderzoekers de robot verfijnen. Ze weten waarom het frame van de duizendpootrobot functioneel is, maar nu bepalen ze het optimale aantal benen. Ze willen beweging bereiken zonder te voelen, op een manier die kosteneffectief is en toch de voordelen behoudt. Ze maken daarbij de afweging tussen energie, snelheid, kracht en robuustheid.
De wetenschappelijke publicatie vindt u hier.
Foto: Georgia Tech