
13/03/2023
Door Ad Spijkers
Een onderzoeksteam van het Shenzhen Institute of Advanced Technology heeft een bionische viervoetige zachte dunne-film microrobot ontwikkeld.
De microrobot met een massa van slechts 41 mg wordt aangedreven door magnetische velden en is veelbelovend voor maagonderzoek en -behandeling. Onderzoekers realiseerden de multimodale voortbewegingscontrole van de zachte microrobot in magnetische velden en het grijpen en transporteren van micro-objecten door de zachte microrobot.
Microrobots
Ongebonden microrobots hebben veel aandacht gekregen vanwege hun potentieel in biomedische toepassingen en kleinschalige micromanipulatie. Doordat magnetische velden onschadelijk zijn voor biologische cellen en weefsels worden magnetische velden veel gebruikt om microrobots aan te sturen voor biomedische toepassingen.
Geïnspireerd door intelligente wezens in de natuur, ontwierpen en fabriceerden onderzoekers een nieuwe ongebonden viervoetige zachte dunne-film microrobot. Deze bestaat uit vier zachte poten met speciale gemagnetiseerde profielen en een niet-magnetisch filmlichaam. De robot met eenvoudige structuur is vervaardigd door middel van ontkistingstechnologie waarvan de mallen zijn geproduceerd door middel van een nauwkeurig 3D printproces.
Beweging
Volgens de onderzoekers kon de microrobot door het gebruik van verschillende magnetische velden een multimodale voortbeweging maken, inclusief rechtdoor bewegen en kruipen. Door een kegelvormig magnetisch veld op te wekken kan de microrobot afwisselend zijn benen bewegen om op een vlakke ondergrond te lopen, net als de gang van een viervoeter.
De viervoetige microrobot heeft meerdere stabiele bewegingsmodi en flexibele besturing en kan zich verplaatsen in een verscheidenheid aan complexe obstakelomgevingen. De microrobot kan over drie trappen lopen, elk met een hoogte van 1 mm. Bovendien kan de viervoeter zich verplaatsen op de bodem van het met groeven gevulde maagmodel. De robot kan over obstakels lopen die ongeveer 2,2 mm hoog zijn. Wanneer het obstakel hoger is, kan de microrobot overschakelen naar de rolmodus om het obstakel te passeren.
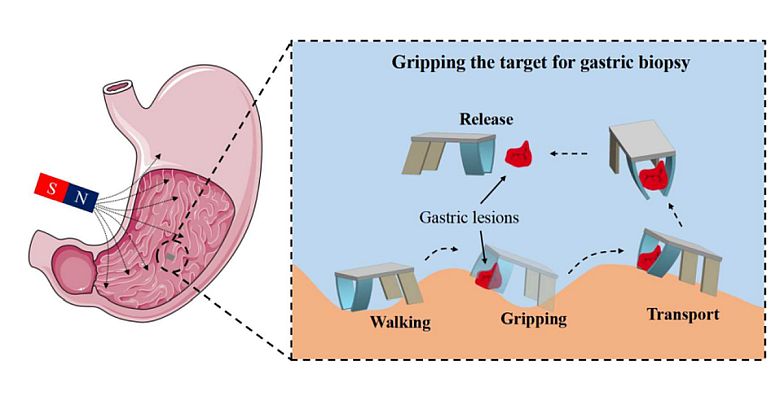
Grijper
De viervoetige microrobot kan ook goed ladingen grijpen. De grootte van de magnetische veldcomponent in de laterale richting van het lichaam van de microrobot maakt het mogelijk om de afstand tussen de achterpoten van de microrobot aan te passen, wat het vastgrijpen en loslaten van lading mogelijk maakt. Onderzoekers zijn erin geslaagd de microrobot te besturen die twee doelkorrels in verschillende posities naar de gespecificeerde doellocatie transporteert, wat daadwerkelijk het vermogen verifieert om de lading vast te pakken en te transporteren. Experimenten tonen aan dat de microrobot objecten tot drie keer zijn eigen gewicht kan grijpen en transporteren.
De onderzoekers verwachten dat de viervoetige zachte microrobot naar verwachting zal worden toegepast bij maagonderzoek en -behandeling. De wetenschappers wijden zich nu aan het optimaliseren van het ontwerp van de microrobot voor efficiëntere bewegingen en betere grijpmogelijkheden.
De wetenschappelijke publicatie vindt u hier.
Foto: Chenyang Huang, Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences