
18/12/2023
Door Ad Spijkers
Simulatiesoftware van het Canadese RoboDK kan helpen om botsingen en daarmee schade of erger in echte opstellingen te voorkomen.
Industriële robots hebben de manier waarop industrieën opereren veranderd. Maar nu ze integraal onderdeel worden van de moderne productie, is het garanderen van de veilige en efficiënte werking ervan van het allergrootste belang. Vooral het vermijden van botsingen komt naar voren als een centrale zorg, gezien de potentiële risico's die gepaard gaan met onbedoelde robotbewegingen op dichtbevolkte fabrieksvloeren.
Voorkomen is beter
Het doel is eenvoudig: voorkomen dat robots onbedoeld contact maken met objecten, andere robots of mensen. Maar de implementatie is complex. In tegenstelling tot gecontroleerde laboratoriumomgevingen zijn fabrieksvloeren dynamisch. Werknemers bewegen zich, er worden nieuwe objecten geïntroduceerd en robots wisselen van positie. Het voorspellen van elke mogelijke beweging in zo’n steeds veranderende omgeving is een hele klus.
Traditionele robots vertrouwen vaak op (een beperkt aantal) sensoren, die mogelijk niet de volledige reikwijdte van hun omgeving vastleggen. Dode hoeken kunnen tot misrekeningen leiden, waardoor de kans op botsingen groter wordt. En industriële robots zijn er in verschillende soorten en maten, elk met zijn eigen set bewegende delen. Mensen bewegen niet met de voorspelbaarheid van machines. Ze kunnen abrupt van richting veranderen of onverwachte gebaren maken, waardoor het voor robots een uitdaging wordt om te anticiperen en botsingen te vermijden.
De rol van AI
Om botsingen te vermijden, is real-time dataverwerking vereist. Elke vertraging bij het verwerken van sensorische input of bij het uitvoeren van een reactie kan tot ongelukken leiden. Dit geldt vooral wanneer robots met hoge snelheden of met zware massa's werken. In omgevingen waar meerdere robots in elkaars omgeving werken, is effectieve communicatie cruciaal. Een fout in het doorgeven van positiedata of beoogde bewegingen kan ertoe leiden dat twee robots onbedoeld in elkaars pad komen.
Robots vertrouwen op sensoren om hun omgeving te begrijpen. Camera's leggen visuele gegevens vast, lidar meet afstanden met laserlicht, ultrasone sensoren detecteren obstakels via geluidsgolven. Kunstmatige intelligentie blinkt uit in het samenvoegen van deze multimodale datastromen om een alomvattend, real-time beeld van de omgeving te vormen. Dit proces staat bekend als sensorfusie.
Leren
Door diverse sensorische input te integreren, zorgt AI ervoor dat robots een holistisch inzicht hebben in hun omgeving. Hierdoor worden blinde vlekken verminderd en de besluitvorming verbeterd. In de snel veranderende wereld van industriële robotica moeten beslissingen in een oogwenk worden genomen. De vaardigheid van AI in het snel verwerken van grote hoeveelheden data zorgt ervoor dat robots in een fractie van een seconde beslissingen kunnen nemen, of het nu gaat om een plotselinge stop of een verandering van richting.
De kracht van AI ligt in het vermogen om te leren en zich aan te passen. Terwijl robots met nieuwe scenario's of uitdagingen worden geconfronteerd, verfijnen AI-algoritmen hun strategieën. Hierdoor kunnen betere resultaten in de toekomst worden gegarandeerd. Deze continue cyclus van leren en updaten is van cruciaal belang voor robots om effectief en veilig te blijven in een steeds evoluerende industriële omgeving.
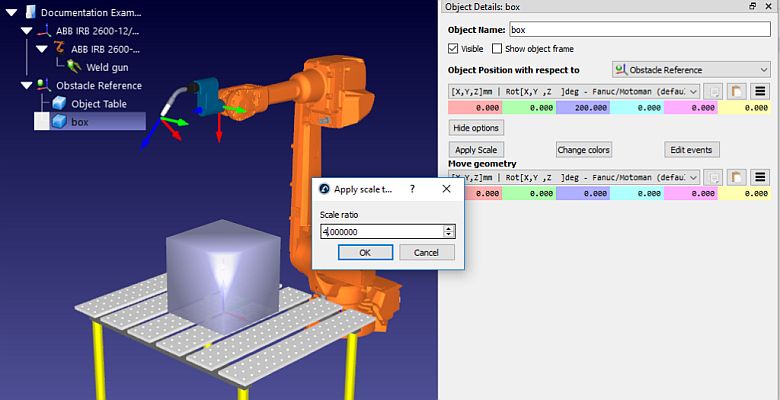
Botsingscontrole met simulatiesoftware van RoboDK uit Montreal kan helpen botsingen in een echte opstelling te voorkomen. De software kan op verschillende manieren worden gebruikt, zoals het visueel controleren van botsingen, het automatisch vermijden van botsingen voor robotbewerkingsprojecten of het genereren van een botsingsvrije kaart om automatisch botsingsvrije programma's te maken.
Foto: RoboDK