
30/05/2023
Door Ad Spijkers
Onderzoekers van de Universiteit van Osaka ontwikkelen een nieuwe duizendpootachtige robot.
Onderzoekers aan de Universiteit van Osaka hebben een nieuw soort lopende robot uitgevonden die profiteert van dynamische instabiliteit om te navigeren. Door de flexibiliteit van de koppelingen te veranderen, kan de robot draaien zonder dat daar complexe computerbesturingssystemen voor nodig zijn. Dit werk kan helpen bij het creëren van reddingsrobots die oneffen terrein kunnen doorkruisen.
Voortbeweging
De meeste dieren op aarde hebben een robuust voortbewegingssysteem ontwikkeld met behulp van poten. Deze bieden hen een hoge mate van mobiliteit in een scala van omgevingen. Ingenieurs die hebben geprobeerd deze benadering na te bootsen, hebben vaak ontdekt dat robots met bonen kwetsbaar zijn. Het afbreken van zelfs maar één been als gevolg van de herhaalde belasting kan het vermogen van deze robots om te functioneren ernstig beperken. Ook vereist het aansturen van een groot aantal gewrichten, zodat de robot complexe omgevingen kan doorkruisen, veel rekenkracht.
Verbeteringen in dit ontwerp zouden nuttig zijn voor het bouwen van autonome of semi-autonome robots die kunnen fungeren als verkennings- of reddingsvoertuigen en gevaarlijke gebieden kunnen betreden.
Duizendpoot
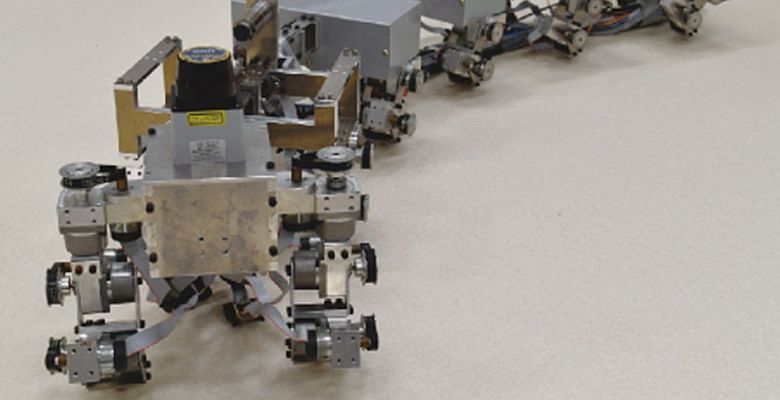
De onderzoekers in Osaka hebben een biomimetische duizendpootachtige robot ontwikkeld die profiteert van een natuurlijke instabiliteit die recht lopen kan omzetten in gebogen bewegingen. In een studie beschrijven ze hun robot, die uit zes segmenten bestaat (met twee benen verbonden met elk segment) en flexibele gewrichten. Met behulp van een verstelbare schroef kan de flexibiliteit van de koppelingen tijdens de loopbeweging met motoren worden aangepast.
De onderzoekers toonden aan dat het vergroten van de flexibiliteit van de gewrichten leidde tot een situatie die een 'hooivork-bifurcatie' (pitchfork bifurcation) wordt genoemd, waarin rechtdoor lopen onstabiel wordt. In plaats daarvan gaat de robot over op lopen in een gebogen patroon, naar rechts of naar links. Normaal gesproken zouden ingenieurs proberen instabiliteiten te voorkomen. Door er gecontroleerd gebruik van te maken, kan echter een efficiënte manoeuvreerbaarheid mogelijk worden gemaakt.
De onderzoekers werden geïnspireerd door het vermogen van bepaalde extreem behendige insecten waarmee ze de dynamische instabiliteit in hun eigen beweging kunnen beheersen om snelle bewegingsveranderingen teweeg te brengen. Omdat deze benadering niet direct de beweging van de lichaamsas stuurt, maar eerder de flexibiliteit regelt, kan het zowel de rekenkundige complexiteit als de energiebehoefte aanzienlijk verminderen.
Testen
Het team testte het vermogen van de robot om specifieke locaties te bereiken en ontdekte dat deze kon navigeren door gebogen paden naar doelen te nemen. Ze voorzien toepassingen in een breed scala aan scenario's, zoals zoeken en redden, werken in gevaarlijke omgevingen of verkenning op andere planeten. Toekomstige versies kunnen extra segmenten en besturingsmechanismen bevatten.
De wetenschappelijke publicatie vindt u hier.
Foto: Universiteit van Osaka