
18/04/2023
Door Ad Spijkers
Italiaanse onderzoekers ontwikkelen een robotplatform dat kan leren zoals mensen dat doen terwijl de robot rondrijdt in een ruimte.
Onderzoekers van het Human Brain Project binnen het Instituut voor Biofysica van de Nationale Onderzoeksraad (IBF-CNR) in Palermo hebben de neuronale architectuur en verbindingen van de hippocampus in de hersenen nagebootst. De gesimuleerde hippocampus kan zijn synaptische verbindingen veranderen terwijl hij een auto-achtige virtuele robot beweegt.
Cruciaal is dat deze slechts één keer naar een specifieke bestemming hoeft te navigeren voordat hij het pad kan onthouden. Dit is een duidelijke verbetering ten opzichte van de huidige autonome navigatiemethoden die afhankelijk zijn van deep learning en in plaats daarvan duizenden mogelijke paden moeten berekenen.
Navigatie
Er zijn andere navigatiesystemen die de rol van de hippocampus simuleren, dat als werkgeheugen voor de hersenen fungeert. Dit is volgens de onderzoekers echter de eerste keer dat de onderzoekers niet alleen de rol, maar ook de architectuur van de hippocampus kunnen nabootsen, tot aan de individuele neuronen en hun verbindingen toe. Ze hebben het geheugen gebouwd met behulp van de fundamentele bouwstenen en kenmerken die in de literatuur bekend zijn, zoals neuronen die coderen voor objecten, specifieke verbindingen en synaptische plasticiteit.
Geïnspireerd door de biologie konden de onderzoekers andere sets regels voor navigatie gebruiken dan die worden gebruikt door platforms die door deep learning worden aangestuurd. Om een bepaalde bestemming te bereiken, berekent een DL-systeem mogelijke paden op een kaart. Het wijst daar kosten aan toe, waardoor uiteindelijk het goedkoopste pad wordt gekozen. Het is gebaseerd op vallen en opstaan en vereist uitgebreide berekeningen.
Geheugen
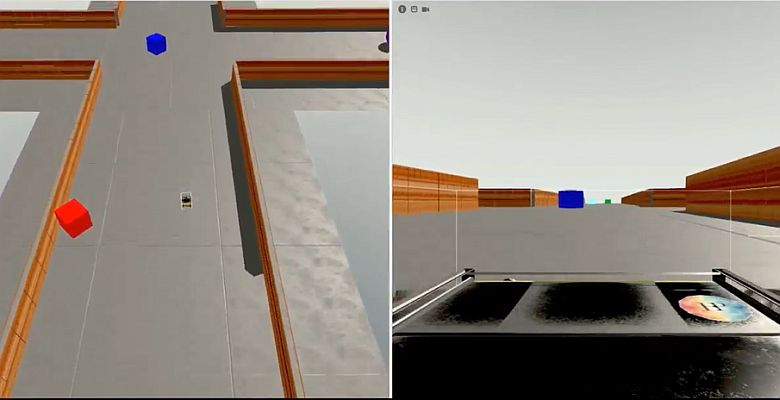
Het nieuwe systeem baseert zijn berekening op wat het actief kan zien door zijn camera. Bij het navigeren door een T-vormige gang controleert het de relatieve positie van belangrijke oriëntatiepunten (zoals gekleurde kubussen). In het begin beweegt het voertuig willekeurig, maar zodra het zijn bestemming heeft bereikt, reconstrueert het geheugen een kaart. Dit gebeurt door de neuronen te herschikken in zijn gesimuleerde hippocampus en ze toe te wijzen aan de oriëntatiepunten.
Het geheugen hoeft maar één keer te trainen om te onthouden hoe het op de bestemming moet komen. Dit lijkt meer op hoe mensen en dieren zich voortbewegen. Wanneer u bijvoorbeeld een museum bezoekt, dwaal je eerst rond in de ruimte, zonder de weg te weten. Maar als u dan terugkeert naar een specifieke tentoonstelling, herinnert u zich meteen alle benodigde stappen.
Zowel het robotplatform als de hippocampussimulatie zijn eerst geïmplementeerd via de digitale onderzoeksinfrastructuur EBrains. Vervolgens konden de onderzoekers een fysieke robot bouwen en testen in een echte ruimte. De objectherkenning was gebaseerd op visuele input via de camera van de robot, maar het brein zou in theorie kunnen worden gekalibreerd op geluid, geur of beweging. Het belangrijkste onderdeel is de biologisch geïnspireerde set regels voor navigatie, die gemakkelijk kan worden aangepast aan meerdere omgevingen en inputs.
Vervolg
Onderzoekers werken nu aan het op maat maken van het systeem voor industrieel gebruik door te coderen voor de herkenning van specifieke vormen. Een robot die in een magazijn werkt, kan zichzelf kalibreren en binnen een paar uur de positie van de schappen onthouden. Een andere mogelijkheid is het helpen van slechtzienden, het onthouden van een huiselijke omgeving en optreden als robotgeleidehond.
De wetenschappelijke publicatie vindt u hier.
Foto: The Human Brain Project